
ID : 5353
TrackTargetPos
Function
Read out workpiece data from the tracking buffer and then set them to the tracking-target work.
This command is available in Ver.1.6.* or higher.
Syntax
TrackTargetPos (Conveyor number[, Time-out period[, UserData[, Data Processing type[, Remaining time]]])
Guaranteed Entry
- Conveyor number
-
Specify the conveyor number (1-16) to be used by integer type data.
(If your robot controller is Ver.1.11.* or lower, available conveyor number is 1 or 2.) - Time-out period
-
Specify a timeout period by integer type data. Unit is [msec]. This should be "infinite waiting" if "-1" is set. If UserData is not set, this can be omitted. In that case, this should be "infinite waiting".
If time-out period passes, Level 1 error will occur. To continue processing without stopping the program when an error occurs, use "On Error" command. - UserData
- Specifying a UserData value allows to take out workpiece data with specified UserData value from the tracking buffer.
Specify userdata by integer type. This is an optional value. This does not judge the UserData if it is omitted. If minus value is set, it is treated same as when it is omitted.
UserData can be specified with "TrackSetVision" and/or "TrackSetSensor" per workpiece. - Data processing type
-
Specify the data retention by integer type data. This is omittable. This should be "-1" if it is omitted.
Data processing type consists of three items: Tracking Buffer data, Picking order, and Downstream limit picking. As the following table shows, more than one items can be enabled at the same time.Setting value Tracking Buffer data Picking order Downstream limit picking 1 Enabled - - 2 - Enabled - 3 Enabled Enabled - 4 - - Enabled 5 Enabled - Enabled 6 - Enabled Enabled 7 Enabled Enabled Enabled -1 - - - The table below shows the functions of each item.
Mode Setting Description Tracking Buffer data Enabled Copied work data will be used. The original work data in the tracking buffer remains. Disabled Work data in the tracking buffer will be deleted once the work data is taken out of the tracking buffer. Picking order Enabled Retrieve the data within the tracking buffer in order from the beginning. Disabled Retrieve the data within the tracking buffer in order from the end. Downstream limit picking Enabled Work data that has passed the downstream limit of the tracking range is included in the picking target.
This function is used to perform tracking operation with long object whose length is larger than the tracking range.Disabled Work data that has passed the downstream limit of the tracking range is not included in the picking target. - Remaining time
-
Specify the traveling time to the downstream limit by integer type data. Unit is [msec].
The conveyor range calculated from this value and the current conveyor speed will be excluded from the search area.
If "-1" is entered, the whole tracking area will be the search area. This entry is omittable. If there is no entry, "-1" will be set automatically.
This function is available in Ver.2.3.* or higher.
Return Value
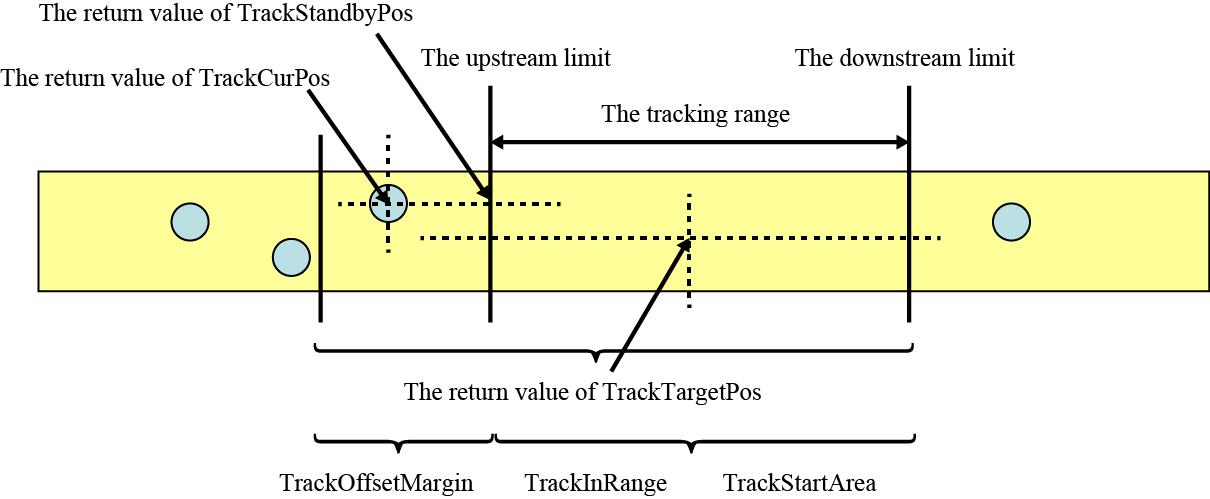
The conveyor reference position based on the currently selected work coordinate and tool coordinate is returned with position type data.
This data indicates the conveyor reference position that is perpetual position.
This data is used as the target position of "TrackMove" command and as the reference position of "TrackApproach" command.
Description
From the tracking buffer, take out workdata which positions are within the tracking range.
Obtained workdata is set as tracking-target work. If specified workdata does not exist in the tracking buffer, program stops in the line until the time-out time specified in the second argument elapses.
If time-out period passes, Level 1 error will occur.
Related Terms
TrackBufferDelete, TrackBufferIndexes, TrackBufferRead, TrackCount, TrackCurStartArea, TrackInRange, TrackOffsetMargin, TrackSetSensor, TrackSetVision, TrackStartArea, TrackTargetRelease, Commands for Conveyor Tracking, Commands for Circular Tracking
Attention
- This command is dedicated for conveyor and circular tracking.
- This command sorts the data in the tracking buffer, therefore storing too many data in the tracking buffer will take longer time to return the value.
- If a workpiece is detected by the vision and is registered with TrackSetVision after the same workpiece has already been selected from the tracking buffer with TrackTargetPos, the workpiece will be registered as the different workpiece. Please take into consideration this point if the range of TrackTargetPos overlaps with the vision area.
Example
P[10] = TrackTargetPos(1, -1, 1)Wait indefinitely until workdata of userdata 1 on the Conveyor 1 is taken out from the tracking buffer.
P[10] = TrackTargetPos(1, -1, -1, 1, 1000)Workpiece which remaining time to the downstream limit is less than 1000 milliseconds is not selected as a target workpiece.
ID : 5353