
ID : 2892
Programming
This chapter describes sample programs of the circular tracking.
- When you perform the teaching with 4-Axis robots, set the 4-th axis around 0 degrees.
- For the Control set of motion optimization (SpeedMode), select "0: None" or "1: PTP".
- Tracking-related commands cannot be executed in the teach check mode.
If you execute these commands in the teach check mode, an error "82201808 Change to automatic mode to execute the command" will be issued. - For two or more robots, each slave obtains the workpiece data by using the same process as the master.
- When executing tracking more than twice to the same work, that work could be registered doubly due to the problem of calibration precision. Each turntable needs to be calibrated respectively.
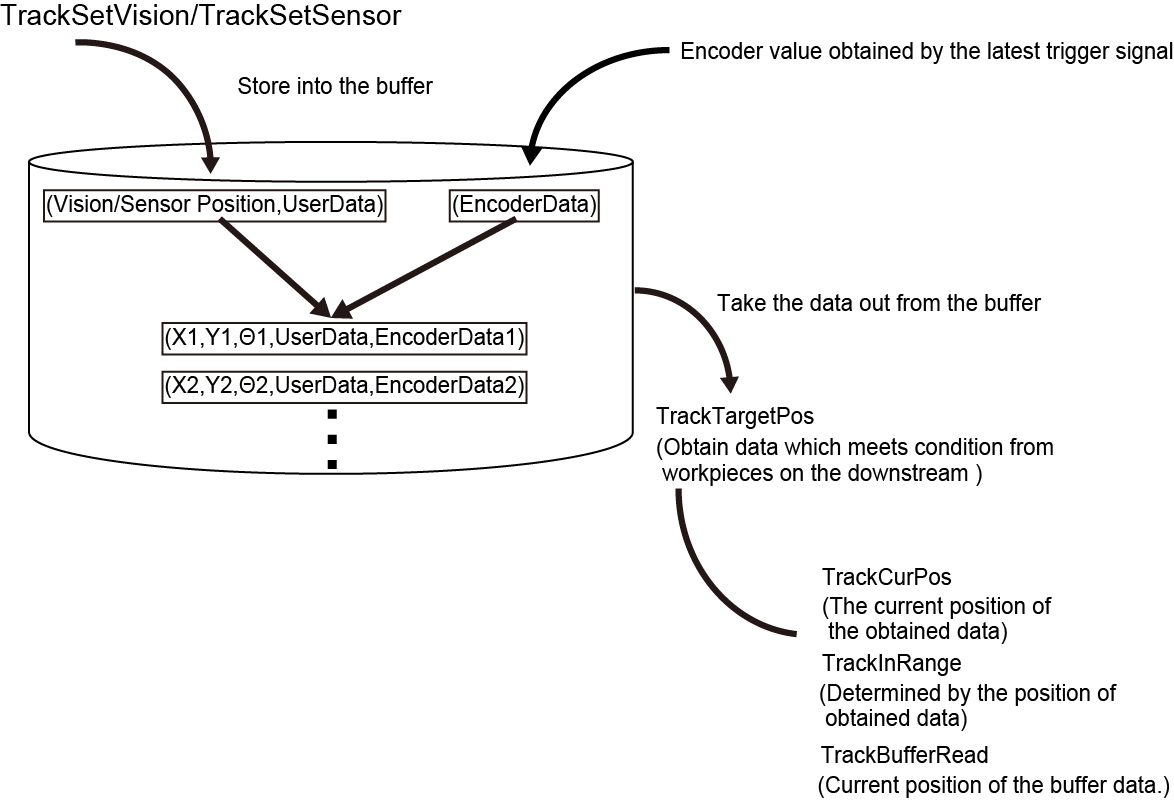
Position Where the Return Values of Each Command Indicate
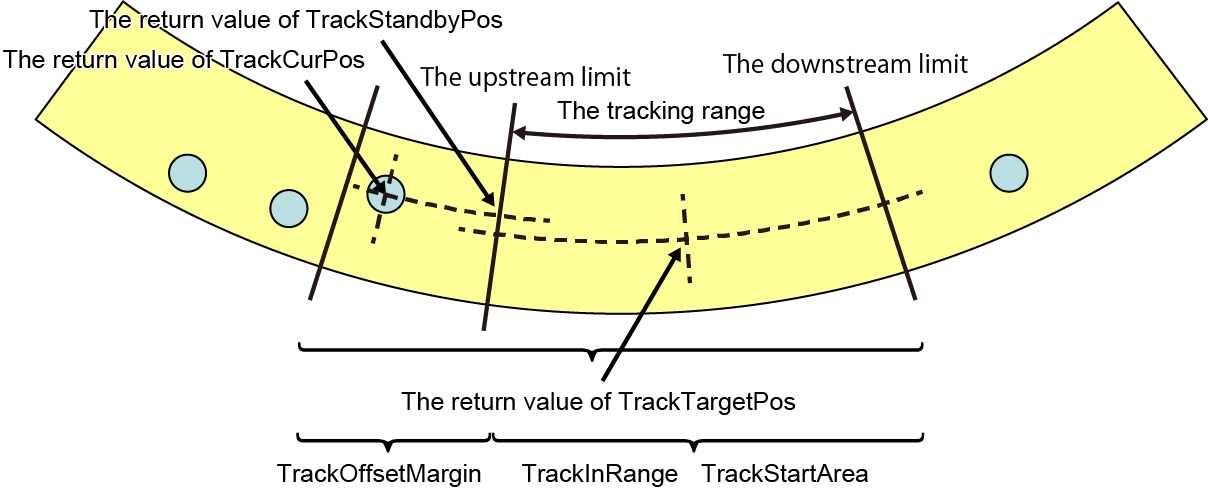
Related Terms
TrackCurPos, TrackInRange, TrackOffsetMargin, TrackStandByPos, TrackTargetPos
ID : 2892
- Related Information
- Sample Program for a Sensor Tracking
- Programming Examples of the Vision Tracking
- Deleting Tracking Buffer Data
- Equipment Protection by Area Function
- Target Position Adjustment and Relative Motion of Circular Tracking
- Time Left to Downstream Limit
- Target Position Check of Robot Task Motion