
ID : 3054
Selective Extended Joint(EtherCAT)
Overview
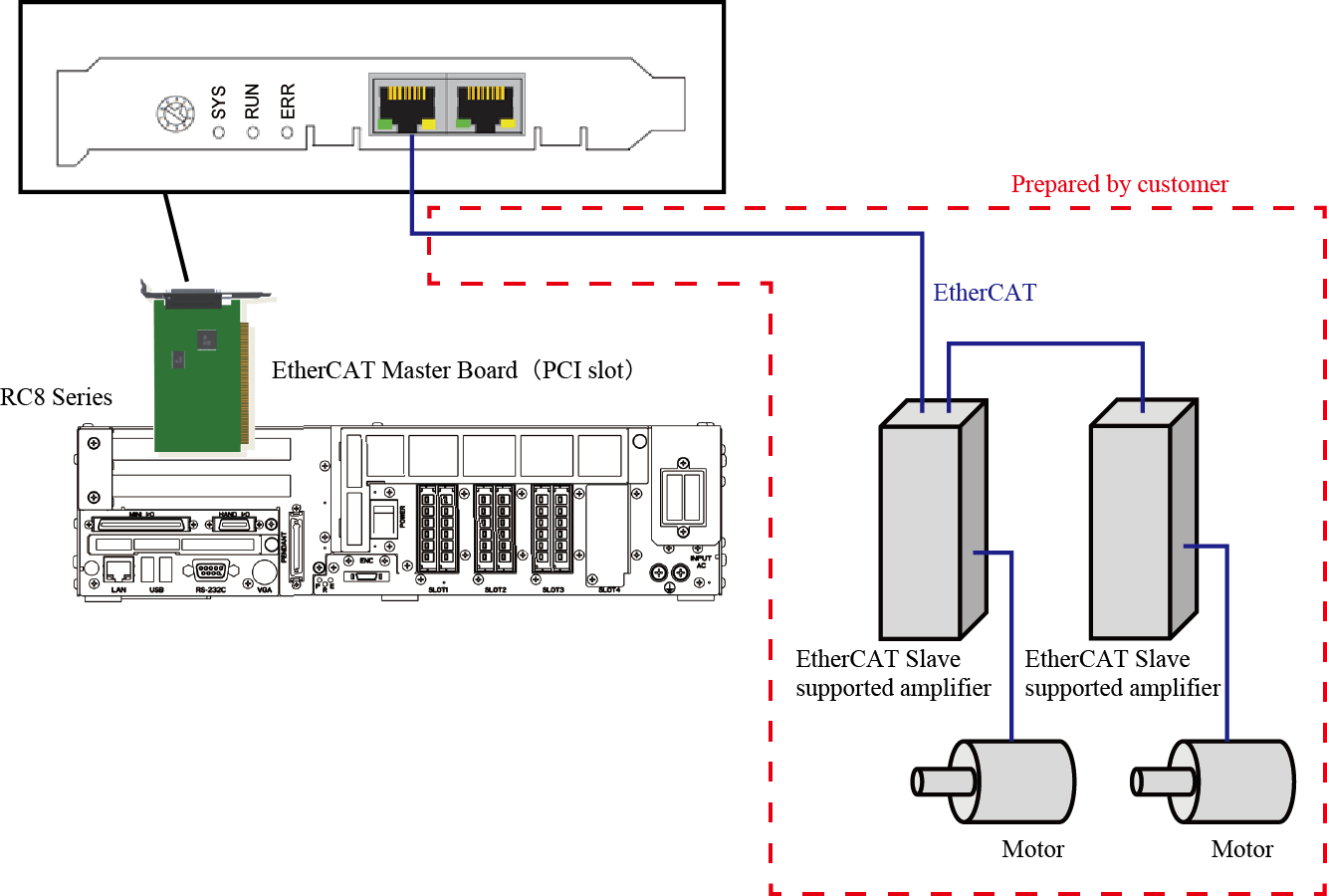
This function is able to use external equipment (amplifier, motor) that supports EtherCAT Slave as an extended-joint.
Generate trajectory including extended-joint with RC8 series controller and by using EtherCAT communication, transfer the data to the external equipment used as Slave. The external equipment performs according to its position command value.
User program is able to operate external equipment by using the command which makes a normal extended-joint perform.
EtherCAT communication needs to install EtherCAT master board on PCI slot of RC8 series controller. To enable its function, "Selective Extended Joint(EtherCAT)" License (non-free) is also needed.
Usable Selective Extended Joint(EtherCAT) can be added up to two joints to 6Axis Robots and can be added up to four joints to 4Axis Robots.
This function is available in Ver.2.2.* or higher.
In Ver.2.2.*, usable Selective Extended Joint(EtherCAT) can be added up to two joints.
Details
For details, refer to the "SELECTIVE EXTENDED JOINT (ETHERCAT) MANUAL".
ID : 3054