
ID : 2217
Extended-Joint Function
Overview
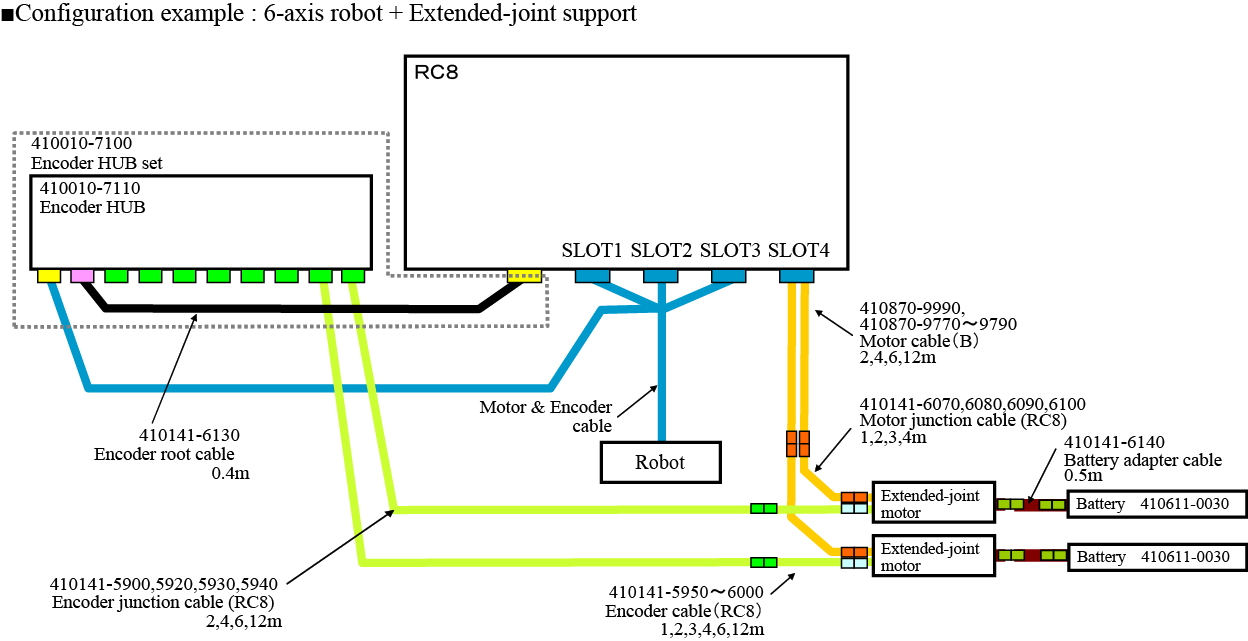
The extended-joint function allows a single controller controlling extended-joints as well as robot joints. The word "joint" mentioned here indicates a movable unit with one of more motors. Additionally connected joints are called "extended-joints". This function is available from Ver.1.5.* or later.
Users design extended-joints by using extended-joint motors. For about available extended-joint motors refer to "EXTENDED-JOINT MANUAL".
The applications of extended-joints are, for example:
- a sliding unit or rotary table that provides work piece for a system,
- a movable unit that moves or rotates a robot for extending the operation range.
Extended-joints can be added up to two joints for a 6-axis robot, and four joints for a 4-axis robot.
A robot controller designed for extended-joints is mounted driver boards for extended-joints on the slots.
You can program extended-joints so as to move along with the robot motion. Also, each joints can be moved together as a group as well as be moved individually. For extended-joints operation, extended-joint dedicated commands written in PacScript and command options are provided.
Details
For details, refer to the "EXTENDED-JOINT MANUAL".
ID : 2217