
ID : 5210
Position Data Handled by 6-Axis Robots
Position data refers to a set of data which includes RX, RY and five components of base coordinates (the work coordinates system if an work coordinates system is defined). Of these five components, three are robot flange center coordinates (the end-effector tip coordinates if an end-effector is defined) and two are current robot attitude components, as shown below.
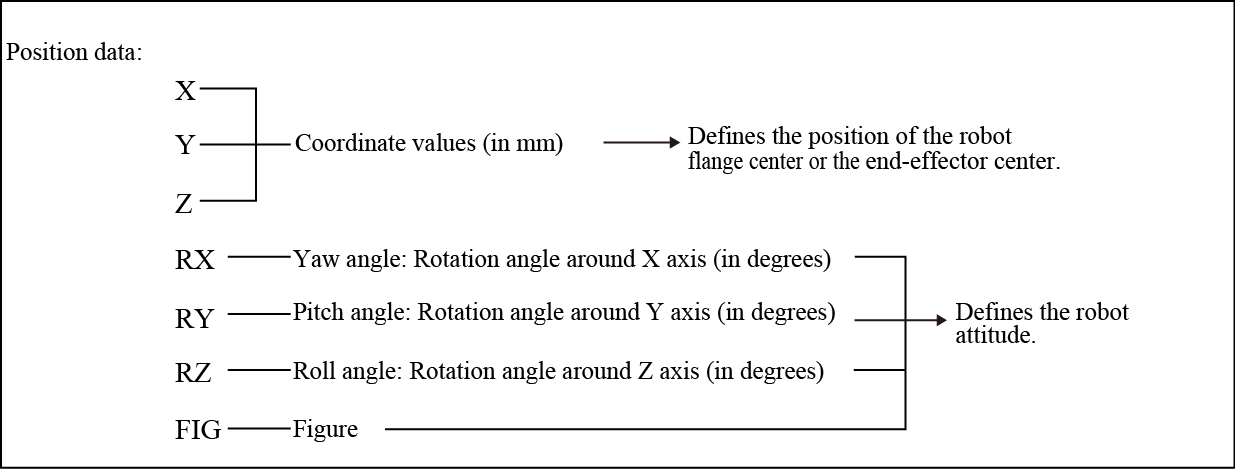
Position data allows you to represent the current position of the robot flange center and object points.
Components of Position Data
A set of X, Y, and Z coordinate values represents the position of the robot flange center (or tip of the end-effector if defined) expressed in base coordinates (the work coordinates system if an work coordinates system is defined) in units of mm.
The yaw angles, pitch angles, and roll angles, which are expressed by RX, RY, and RZ, refer to rotation angles around the respective axes of the base coordinate system (the work coordinates system if an work coordinates system is defined) defined by the mechanical interface coordinate system whose origin is at the center of the flange surface. These angles are expressed in units of degree.
With respect to the positive (+) direction on axes of the base coordinates, clockwise rotation is treated as positive (+).
You should always preserve the rotation order of RZ, RY, and RX. Changing it will cause the robot to take a different attitude in spite of the same rotation angle defined.
Figure represented by the FIG value refers to a figure of robot arm joints. You can not only select a given value, but use the Automatic figure selection function. By using this function, a robot controller automatically selects an appropriate value. For details, refer to "Automatic Figure Selection Function (Auto Fig)".
In 5-axis robots, the flange can keep a constant posture (3-dimensional flange direction) only when it is accurately in parallel with the X-Y plane of the robot (RX and RY are 0 degree).
Figures of the Shoulder, Elbow, and Wrist in 6-Axis Robots
A 6-axis robot can take different figures for its shoulder, elbow, wrist, 6th axis, and 4th axis, and 1st axis for a single point and attitude (X, Y, Z, RX, RY, and RZ) at the end of the end-effector.
Items given on the following pages show how the robot can take different figures for its shoulder, elbow, wrist, 6th axis, 4th axis, and 1st axis respectively.
Combining these different figures allows the robot to take different figures for its single position and attitude.
The table below shows available figures.
For some robot types, TRIPLE in the 4th-axis and the 6th-axis, and DOUBLE in the 1st-axis are not available.
Available Figures
| Value | Shoulder Figure | Elbow Figure | Wrist Figure | 6th-Axis Figure | 4th-Axis Figure | 1st-Axis Figure |
|---|---|---|---|---|---|---|
| 0 | RIGHTY | ABOVE | FLIP | SINGLE | SINGLE | SINGLE |
| 1 | LEFTY | ABOVE | FLIP | SINGLE | SINGLE | SINGLE |
| 2 | RIGHTY | BELOW | FLIP | SINGLE | SINGLE | SINGLE |
| 3 | LEFTY | BELOW | FLIP | SINGLE | SINGLE | SINGLE |
| 4 | RIGHTY | ABOVE | NONFLIP | SINGLE | SINGLE | SINGLE |
| 5 | LEFTY | ABOVE | NONFLIP | SINGLE | SINGLE | SINGLE |
| 6 | RIGHTY | BELOW | NONFLIP | SINGLE | SINGLE | SINGLE |
| 7 | LEFTY | BELOW | NONFLIP | SINGLE | SINGLE | SINGLE |
| 8 | RIGHTY | ABOVE | FLIP | DOUBLE | SINGLE | SINGLE |
| 9 | LEFTY | ABOVE | FLIP | DOUBLE | SINGLE | SINGLE |
| 10 | RIGHTY | BELOW | FLIP | DOUBLE | SINGLE | SINGLE |
| 11 | LEFTY | BELOW | FLIP | DOUBLE | SINGLE | SINGLE |
| 12 | RIGHTY | ABOVE | NONFLIP | DOUBLE | SINGLE | SINGLE |
| 13 | LEFTY | ABOVE | NONFLIP | DOUBLE | SINGLE | SINGLE |
| 14 | RIGHTY | BELOW | NONFLIP | DOUBLE | SINGLE | SINGLE |
| 15 | LEFTY | BELOW | NONFLIP | DOUBLE | SINGLE | SINGLE |
| 16 | RIGHTY | ABOVE | FLIP | SINGLE | DOUBLE | SINGLE |
| 17 | LEFTY | ABOVE | FLIP | SINGLE | DOUBLE | SINGLE |
| 18 | RIGHTY | BELOW | FLIP | SINGLE | DOUBLE | SINGLE |
| 19 | LEFTY | BELOW | FLIP | SINGLE | DOUBLE | SINGLE |
| 20 | RIGHTY | ABOVE | NONFLIP | SINGLE | DOUBLE | SINGLE |
| 21 | LEFTY | ABOVE | NONFLIP | SINGLE | DOUBLE | SINGLE |
| 22 | RIGHTY | BELOW | NONFLIP | SINGLE | DOUBLE | SINGLE |
| 23 | LEFTY | BELOW | NONFLIP | SINGLE | DOUBLE | SINGLE |
| 24 | RIGHTY | ABOVE | FLIP | DOUBLE | DOUBLE | SINGLE |
| 25 | LEFTY | ABOVE | FLIP | DOUBLE | DOUBLE | SINGLE |
| 26 | RIGHTY | BELOW | FLIP | DOUBLE | DOUBLE | SINGLE |
| 27 | LEFTY | BELOW | FLIP | DOUBLE | DOUBLE | SINGLE |
| 28 | RIGHTY | ABOVE | NONFLIP | DOUBLE | DOUBLE | SINGLE |
| 29 | LEFTY | ABOVE | NONFLIP | DOUBLE | DOUBLE | SINGLE |
| 30 | RIGHTY | BELOW | NONFLIP | DOUBLE | DOUBLE | SINGLE |
| 31 | LEFTY | BELOW | NONFLIP | DOUBLE | DOUBLE | SINGLE |
| 32 | RIGHTY | ABOVE | FLIP | SINGLE | TRIPLE | SINGLE |
| 33 | LEFTY | ABOVE | FLIP | SINGLE | TRIPLE | SINGLE |
| 34 | RIGHTY | BELOW | FLIP | SINGLE | TRIPLE | SINGLE |
| 35 | LEFTY | BELOW | FLIP | SINGLE | TRIPLE | SINGLE |
| 36 | RIGHTY | ABOVE | NONFLIP | SINGLE | TRIPLE | SINGLE |
| 37 | LEFTY | ABOVE | NONFLIP | SINGLE | TRIPLE | SINGLE |
| 38 | RIGHTY | BELOW | NONFLIP | SINGLE | TRIPLE | SINGLE |
| 39 | LEFTY | BELOW | NONFLIP | SINGLE | TRIPLE | SINGLE |
| 40 | RIGHTY | ABOVE | FLIP | DOUBLE | TRIPLE | SINGLE |
| 41 | LEFTY | ABOVE | FLIP | DOUBLE | TRIPLE | SINGLE |
| 42 | RIGHTY | BELOW | FLIP | DOUBLE | TRIPLE | SINGLE |
| 43 | LEFTY | BELOW | FLIP | DOUBLE | TRIPLE | SINGLE |
| 44 | RIGHTY | ABOVE | NONFLIP | DOUBLE | TRIPLE | SINGLE |
| 45 | LEFTY | ABOVE | NONFLIP | DOUBLE | TRIPLE | SINGLE |
| 46 | RIGHTY | BELOW | NONFLIP | DOUBLE | TRIPLE | SINGLE |
| 47 | LEFTY | BELOW | NONFLIP | DOUBLE | TRIPLE | SINGLE |
| 64 | RIGHTY | ABOVE | FLIP | SINGLE | SINGLE | DOUBLE |
| 65 | LEFTY | ABOVE | FLIP | SINGLE | SINGLE | DOUBLE |
| 66 | RIGHTY | BELOW | FLIP | SINGLE | SINGLE | DOUBLE |
| 67 | LEFTY | BELOW | FLIP | SINGLE | SINGLE | DOUBLE |
| 68 | RIGHTY | ABOVE | NONFLIP | SINGLE | SINGLE | DOUBLE |
| 69 | LEFTY | ABOVE | NONFLIP | SINGLE | SINGLE | DOUBLE |
| 70 | RIGHTY | BELOW | NONFLIP | SINGLE | SINGLE | DOUBLE |
| 71 | LEFTY | BELOW | NONFLIP | SINGLE | SINGLE | DOUBLE |
| 72 | RIGHTY | ABOVE | FLIP | DOUBLE | SINGLE | DOUBLE |
| 73 | LEFTY | ABOVE | FLIP | DOUBLE | SINGLE | DOUBLE |
| 74 | RIGHTY | BELOW | FLIP | DOUBLE | SINGLE | DOUBLE |
| 75 | LEFTY | BELOW | FLIP | DOUBLE | SINGLE | DOUBLE |
| 76 | RIGHTY | ABOVE | NONFLIP | DOUBLE | SINGLE | DOUBLE |
| 77 | LEFTY | ABOVE | NONFLIP | DOUBLE | SINGLE | DOUBLE |
| 78 | RIGHTY | BELOW | NONFLIP | DOUBLE | SINGLE | DOUBLE |
| 79 | LEFTY | BELOW | NONFLIP | DOUBLE | SINGLE | DOUBLE |
| 80 | RIGHTY | ABOVE | FLIP | SINGLE | DOUBLE | DOUBLE |
| 81 | LEFTY | ABOVE | FLIP | SINGLE | DOUBLE | DOUBLE |
| 82 | RIGHTY | BELOW | FLIP | SINGLE | DOUBLE | DOUBLE |
| 83 | LEFTY | BELOW | FLIP | SINGLE | DOUBLE | DOUBLE |
| 84 | RIGHTY | ABOVE | NONFLIP | SINGLE | DOUBLE | DOUBLE |
| 85 | LEFTY | ABOVE | NONFLIP | SINGLE | DOUBLE | DOUBLE |
| 86 | RIGHTY | BELOW | NONFLIP | SINGLE | DOUBLE | DOUBLE |
| 87 | LEFTY | BELOW | NONFLIP | SINGLE | DOUBLE | DOUBLE |
| 88 | RIGHTY | ABOVE | FLIP | DOUBLE | DOUBLE | DOUBLE |
| 89 | LEFTY | ABOVE | FLIP | DOUBLE | DOUBLE | DOUBLE |
| 90 | RIGHTY | BELOW | FLIP | DOUBLE | DOUBLE | DOUBLE |
| 91 | LEFTY | BELOW | FLIP | DOUBLE | DOUBLE | DOUBLE |
| 92 | RIGHTY | ABOVE | NONFLIP | DOUBLE | DOUBLE | DOUBLE |
| 93 | LEFTY | ABOVE | NONFLIP | DOUBLE | DOUBLE | DOUBLE |
| 94 | RIGHTY | BELOW | NONFLIP | DOUBLE | DOUBLE | DOUBLE |
| 95 | LEFTY | BELOW | NONFLIP | DOUBLE | DOUBLE | DOUBLE |
| 96 | RIGHTY | ABOVE | FLIP | SINGLE | TRIPLE | DOUBLE |
| 97 | LEFTY | ABOVE | FLIP | SINGLE | TRIPLE | DOUBLE |
| 98 | RIGHTY | BELOW | FLIP | SINGLE | TRIPLE | DOUBLE |
| 99 | LEFTY | BELOW | FLIP | SINGLE | TRIPLE | DOUBLE |
| 100 | RIGHTY | ABOVE | NONFLIP | SINGLE | TRIPLE | DOUBLE |
| 101 | LEFTY | ABOVE | NONFLIP | SINGLE | TRIPLE | DOUBLE |
| 102 | RIGHTY | BELOW | NONFLIP | SINGLE | TRIPLE | DOUBLE |
| 103 | LEFTY | BELOW | NONFLIP | SINGLE | TRIPLE | DOUBLE |
| 104 | RIGHTY | ABOVE | FLIP | DOUBLE | TRIPLE | DOUBLE |
| 105 | LEFTY | ABOVE | FLIP | DOUBLE | TRIPLE | DOUBLE |
| 106 | RIGHTY | BELOW | FLIP | DOUBLE | TRIPLE | DOUBLE |
| 107 | LEFTY | BELOW | FLIP | DOUBLE | TRIPLE | DOUBLE |
| 108 | RIGHTY | ABOVE | NONFLIP | DOUBLE | TRIPLE | DOUBLE |
| 109 | LEFTY | ABOVE | NONFLIP | DOUBLE | TRIPLE | DOUBLE |
| 110 | RIGHTY | BELOW | NONFLIP | DOUBLE | TRIPLE | DOUBLE |
| 111 | LEFTY | BELOW | NONFLIP | DOUBLE | TRIPLE | DOUBLE |
| 128 | RIGHTY | ABOVE | FLIP | TRIPLE | SINGLE | SINGLE |
| 129 | LEFTY | ABOVE | FLIP | TRIPLE | SINGLE | SINGLE |
| 130 | RIGHTY | BELOW | FLIP | TRIPLE | SINGLE | SINGLE |
| 131 | LEFTY | BELOW | FLIP | TRIPLE | SINGLE | SINGLE |
| 132 | RIGHTY | ABOVE | NONFLIP | TRIPLE | SINGLE | SINGLE |
| 133 | LEFTY | ABOVE | NONFLIP | TRIPLE | SINGLE | SINGLE |
| 134 | RIGHTY | BELOW | NONFLIP | TRIPLE | SINGLE | SINGLE |
| 135 | LEFTY | BELOW | NONFLIP | TRIPLE | SINGLE | SINGLE |
| 144 | RIGHTY | ABOVE | FLIP | TRIPLE | DOUBLE | SINGLE |
| 145 | LEFTY | ABOVE | FLIP | TRIPLE | DOUBLE | SINGLE |
| 146 | RIGHTY | BELOW | FLIP | TRIPLE | DOUBLE | SINGLE |
| 147 | LEFTY | BELOW | FLIP | TRIPLE | DOUBLE | SINGLE |
| 148 | RIGHTY | ABOVE | NONFLIP | TRIPLE | DOUBLE | SINGLE |
| 149 | LEFTY | ABOVE | NONFLIP | TRIPLE | DOUBLE | SINGLE |
| 150 | RIGHTY | BELOW | NONFLIP | TRIPLE | DOUBLE | SINGLE |
| 151 | LEFTY | BELOW | NONFLIP | TRIPLE | DOUBLE | SINGLE |
| 160 | RIGHTY | ABOVE | FLIP | TRIPLE | TRIPLE | SINGLE |
| 161 | LEFTY | ABOVE | FLIP | TRIPLE | TRIPLE | SINGLE |
| 162 | RIGHTY | BELOW | FLIP | TRIPLE | TRIPLE | SINGLE |
| 163 | LEFTY | BELOW | FLIP | TRIPLE | TRIPLE | SINGLE |
| 164 | RIGHTY | ABOVE | NONFLIP | TRIPLE | TRIPLE | SINGLE |
| 165 | LEFTY | ABOVE | NONFLIP | TRIPLE | TRIPLE | SINGLE |
| 166 | RIGHTY | BELOW | NONFLIP | TRIPLE | TRIPLE | SINGLE |
| 167 | LEFTY | BELOW | NONFLIP | TRIPLE | TRIPLE | SINGLE |
| 192 | RIGHTY | ABOVE | FLIP | TRIPLE | SINGLE | DOUBLE |
| 193 | LEFTY | ABOVE | FLIP | TRIPLE | SINGLE | DOUBLE |
| 194 | RIGHTY | BELOW | FLIP | TRIPLE | SINGLE | DOUBLE |
| 195 | LEFTY | BELOW | FLIP | TRIPLE | SINGLE | DOUBLE |
| 196 | RIGHTY | ABOVE | NONFLIP | TRIPLE | SINGLE | DOUBLE |
| 197 | LEFTY | ABOVE | NONFLIP | TRIPLE | SINGLE | DOUBLE |
| 198 | RIGHTY | BELOW | NONFLIP | TRIPLE | SINGLE | DOUBLE |
| 199 | LEFTY | BELOW | NONFLIP | TRIPLE | SINGLE | DOUBLE |
| 208 | RIGHTY | ABOVE | FLIP | TRIPLE | DOUBLE | DOUBLE |
| 209 | LEFTY | ABOVE | FLIP | TRIPLE | DOUBLE | DOUBLE |
| 210 | RIGHTY | BELOW | FLIP | TRIPLE | DOUBLE | DOUBLE |
| 211 | LEFTY | BELOW | FLIP | TRIPLE | DOUBLE | DOUBLE |
| 212 | RIGHTY | ABOVE | NONFLIP | TRIPLE | DOUBLE | DOUBLE |
| 213 | LEFTY | ABOVE | NONFLIP | TRIPLE | DOUBLE | DOUBLE |
| 214 | RIGHTY | BELOW | NONFLIP | TRIPLE | DOUBLE | DOUBLE |
| 215 | LEFTY | BELOW | NONFLIP | TRIPLE | DOUBLE | DOUBLE |
| 224 | RIGHTY | ABOVE | FLIP | TRIPLE | TRIPLE | DOUBLE |
| 225 | LEFTY | ABOVE | FLIP | TRIPLE | TRIPLE | DOUBLE |
| 226 | RIGHTY | BELOW | FLIP | TRIPLE | TRIPLE | DOUBLE |
| 227 | LEFTY | BELOW | FLIP | TRIPLE | TRIPLE | DOUBLE |
| 228 | RIGHTY | ABOVE | NONFLIP | TRIPLE | TRIPLE | DOUBLE |
| 229 | LEFTY | ABOVE | NONFLIP | TRIPLE | TRIPLE | DOUBLE |
| 230 | RIGHTY | BELOW | NONFLIP | TRIPLE | TRIPLE | DOUBLE |
| 231 | LEFTY | BELOW | NONFLIP | TRIPLE | TRIPLE | DOUBLE |
Shoulder Figure
A shoulder figure is defined by a set of the values of the 1st-, 2nd-, and 3rd-axis components.
The robot can take two different shoulder figures--Left-handed (LEFTY) and Right-handed (RIGHTY).
| LEFTY | RIGHTY |
|---|---|
 |
 |
Boudary between LEFTY and RIGHTY
The rotary axis of the 1st axis is defined as the boundary between LEFTY and RIGHTY.
When viewed from the normal line on the side of the arm link, if point Pw exists in the left-hand side of the rotary axis of the 1st axis, the figure is LEFTY; if point Pw exists in the right-hand side, it is RIGHTY. In the figure shown below, the boundary is drawn with alternate long and short dash lines.
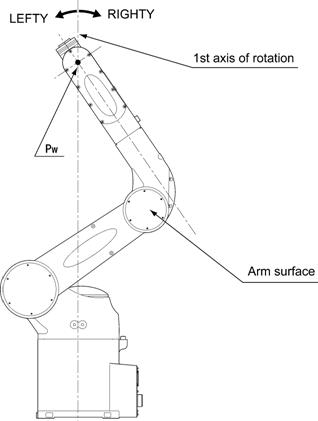
If point Pw exists on the rotary axis of the 1st axis, that is, on the boundary between LEFTY and RIGHTY, then it is called a singular point.
Elbow Figure
The centerline of the arm link (connecting the shoulder with elbow) is defined as the boundary between ABOVE and BELOW.
If point Pw exists in the + side of the centerline, the figure is ABOVE; if point Pw exists in the -side, it is BELOW. In the figures shown below, the boundary is drawn with alternate long and short dash lines.
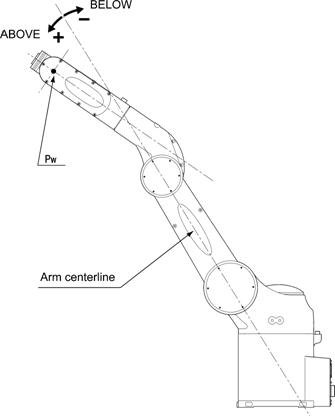
Boundary between ABOVE and BELOW for LEFTY
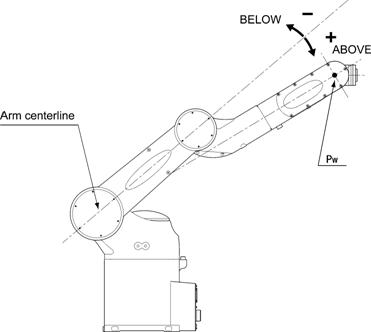
Boundary between ABOVE and BELOW for RIGHTY
Wrist Figure
The rotary axis of the 4th axis is defined as the boundary between FLIP and NONFLIP.
If the normal line on the flange surface tilts up the rotary axis of the 4th axis, the figure is FLIP; if it tilts down the rotary axis, it is NONFLIP. In the figures shown below, the boundary is drawn with alternate long and short dash lines.

Boundary between FLIP and NONFLIP for LEFTY
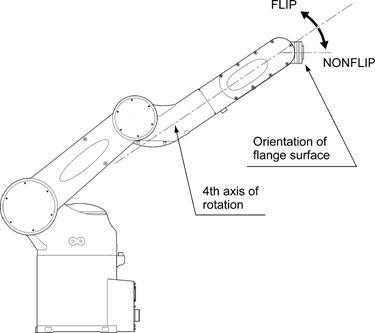
Boundary between FLIP and NONFLIP for RIGHTY
4th-axis Figure
The 4th-axis figure is defined by the value of the 4th-axis component.
This section uses VM robots as an example.
The robot can take two different 4th-axis figures--SINGLE 4and DOUBLE 4. If the 4th axis rotates by -180°<θ4≤180° in mechanical interface coordinates, the figure is SINGLE 4; if it rotates by 180°<θ4≤185° or -185°<θ4≤-180°, the figure is DOUBLE 4.
The robot takes quite different figures when θ4 is 180° or 181°. Take special care when changing any position data for the 4th-axis figure. For example, supposing that you want to change the 4th-axis figure at θ4=181°, the robot will take the 4th-axis figure at θ4=-179° if you make no figure modification.

6th-axis Figure
A 6th-axis figure is defined by the value of the 6th-axis component.
The robot can take two different 6th-axis figures--SINGLE and DOUBLE.
If the 6th axis rotates by -180°<θ6≤180° in mechanical interface coordinates, the figure is SINGLE; if it rotates by 180°<θ6≤360°, the figure is DOUBLE.
The robot takes quite different figures when θ6 is 180° or 181°. Take special care when changing any position data for the 6th-axis figure. For example, supposing that you want to change the 6th-axis figure at θ6=181°, the robot will take the 6th-axis figure at θ6=-179° if you make no figure modification.

ID : 5210