
ID : 5594
Motion Check of the Program
You can check the cycle time, trajectory and posture of the robot by running the created program on the program.
1
On the [Project window], select a program that you would like to check the motion.
The selected program is displayed.
2
On the [Debug] menu, click [Simulation mode].
3
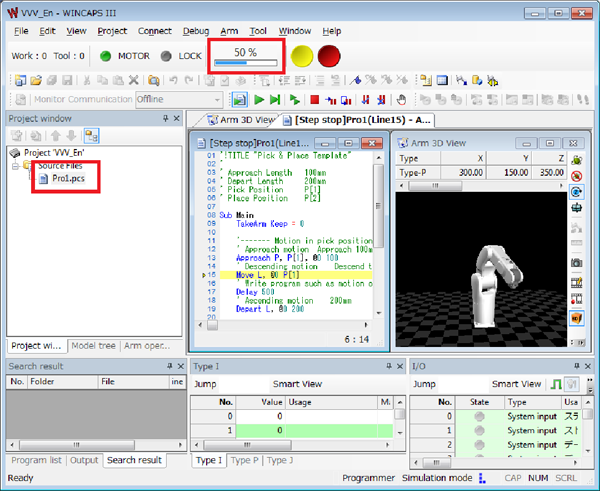
Set the external speed.
On the [TP Status bar], click the speed button which is red-circled in the image above.
4
On the [Debug] menu, select [Start a Task] or [Step in] to execute the program.
5
Check the program flows, the robot posture and the run time in each window.
ID : 5594