
ID : 7354
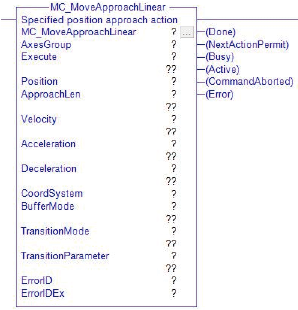
MC_MoveApproachLinear
To move by linear interpolation control to an approach position apart from the reference position by a specified distance.
| Graphic expression | AOI category |
|---|---|
 |
Motion |
Input and Output Variable
| Variable name | Data type | Valid range | Conditions for Input and Output |
|---|---|---|---|
| AxesGroup | eRC_AxesGroup | - | |
|
|||
| Position | eRC_Position | For input | |
|
|||
| CoordSystem | eRC_CoordSys |
|
For input |
|
|||
Input Variable
| Variable name | Data type | Valid range |
|---|---|---|
| Execute | Boolean |
|
|
||
| ApproachLen | Real | - |
|
||
| Velocity | Real | 0.1 to 100.0 |
|
||
| Acceleration | Real | 0.0001 to 100.0 |
|
||
| Deceleration | Real | 0.0001 to 100.0 |
|
||
| BufferMode | Integer | 0, 1, 6, 7, 8, 9 |
|
||
| TransitionMode | Integer | 0, 3, 10, 11 |
|
||
| TransitionParameter | Integer | 0 to 32767 |
|
||
Output Variable
| Variable name | Data type / Description |
|---|---|
| Done | Boolean |
|
|
| NextActionPermit | Boolean |
|
|
| Busy | Boolean |
|
|
| Active | Boolean |
|
|
| CommandAborted | Boolean |
|
|
| Error | Boolean |
|
|
| ErrorID | Integer |
|
|
| ErrorIDEx | DInt |
|
Function Description
The system moves to a position away from the reference position for a holding position, etc. by the approach length.
- About Linear interpolation control
- Linear interpolation control manages interpolation so that the path to reach the motion destination position will be a straight line.
The figure below shows an example of motion by linear interpolation control.

Attention
To execute this AOI, AOI with the AOI category "Motion" needs to be made executable.
To make AOI with the AOI category "Motion" executable, use the AOI "MC_Power".
ID : 7354