
ID : 2005
Cooperative Motion in Manual Operation
Operate two robots with the cooperative motion in manual mode.
This section shows two examples of the cooperative motion; Moving the leader robot to the +Y direction. Moving the leader robot to the +Rx direction.
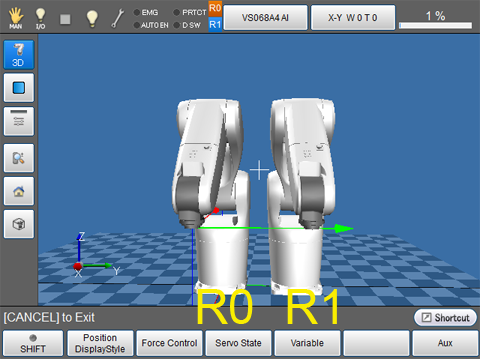
- Before the cooperative motion starts, the base coordinate must be specified. For about the way of base coordinate setting, see "Base coordinates setting".
- Joint mode is not available in the cooperative motion.
Moving the Leader Robot to the +Y Direction
To move the leader robot to the +Y direction, with the deadman switch on the teach pendant pressed, on the Arm traverse key area, press "+" button on the J2/Y.
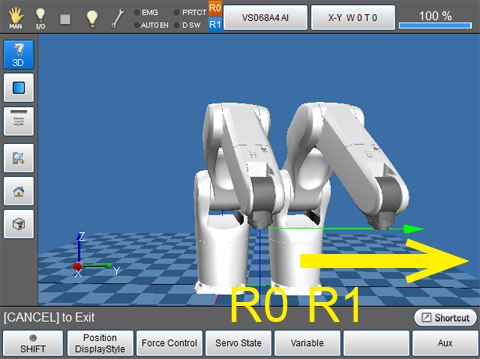
You can see the follower robot follows the motion of the leader robot, and moves to the direction that the arrow shows.
Moving the Leader Robot to the +Rx Direction
To move the leader robot to the +Rx direction, with the deadman switch on the teach pendant pressed, on the Arm traverse key area, press "+" button on the J4/Rx.
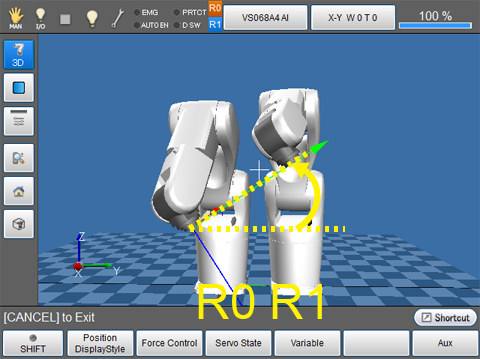
In the cooperative motion, the center of rotation of the follower robot is the origin of the tool coordinate of the leader robot.
In this example, since the tool coordinate of the leader robot is set to TOOL0, the follower robot rotates around the center of the leader robot's flange.
ID : 2005