
ID : 2495
Effects on the Existing Functions
Functions not Available in Safety Motion
The following functions are not available in the safety motion.
- Unavailable functions related to Extended-Joint
Boundless rotation, Disable the Motion limit detection, AutoPositionClear, PosClr command - Unavailable functions related to Robot axis
Boundless Rotation of Robot Axis, PosClr command
Functions where an Error may be Detected
When you use the following functions, do not use SS2 input nor RSM1 to 3 inputs. An error may be detected during speed monitoring.
- Conveyor Tracking
- Current Limiting Function (CurLmt)
- Force Control Function (ForceCtrl)
- Release of Servo-locked state unlock (SrvUnLock)
- Current limiting function of the third axis (Z axis) in H series robot (ZForce)
- b-Cap Slave function
- Cooperative Control Function
- Arch Motion (ArchMove)
Functions whose Usage is Limited
If Parameters Relating to Robot (Configuration and Axis to be set) Changed
In Safety Motion function, the necessary data to monitoring, as well as the parameters relating to the configuration and the axis to be set, are used. The parameters on the robot (for details, see the following "Parameters relating to Robot") is stored for the robot control and for the safety motion respectively. If you change the parameters relating to the robot with teach pendant/ mini pendant or change the parameters by using WINCAPSIII, and then send that parameters to the robot controller, the parameters relating to the robot controller are always changed, but won't be reflected to the parameters which are the stored area for the safety motion. The place to be stored for the safety motion is able to be sent the parameter relating to the robot automatically, by sending the necessary data to monitoring with RC8A Safety parameter tool. Thus, if you change the parameters relating to the robot, you need to send the necessary data to monitoring with RC8A Safety parameter tool, and restart the robot controller.
Also, if you have changed the parameters relating to the robot with teach pendant/ mini pendant, after reading out all the data about the robot controller and saving it, send the necessary data to monitoring for the project with RC8A Safety parameter tool, and restart the robot controller.
When you change the parameters relating to the robot, if you won't use the method mentioned above to reflect to the stored area for the safety motion may fail to operate correctly as a result and it is dangerous. Be sure to reflect the parameters to the stored area for the safety motion.
Parameters relating to Robot
Parameters relating to Robot are the parameters which change according to the following operations. Be sure to reflect the parameters to the stored area for the safety motion.
- Teach Pendant
The following parameters enclosed in square brackets, which show the each operation to be changed, are relating to the robot.
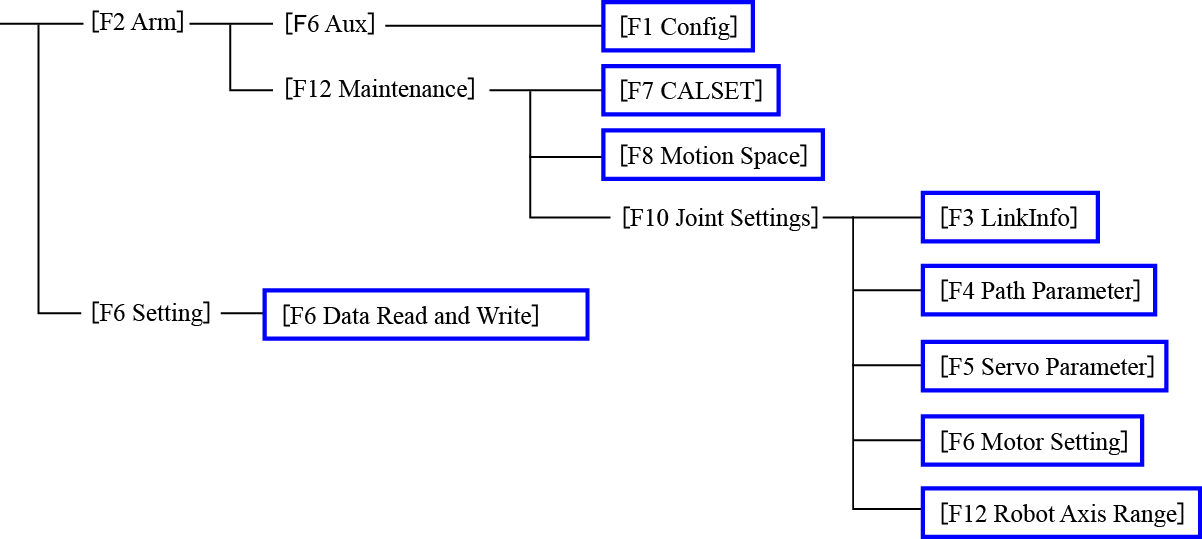
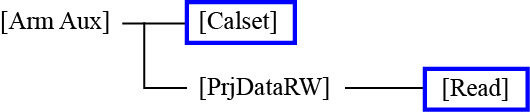
- Mini Pendant
The following parameters enclosed in square brackets, which show the each operation to be changed, are relating to the robot.
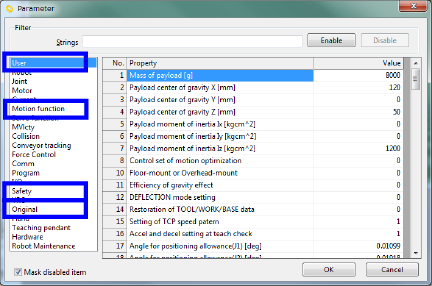
- WINCAPSIII
The following parameters, which show the each operation to be changed, are relating to the robot.
Parameters Operation path: [Project] - [Parameter]
Corresponding parameters
- User
- Motion Function
- Safety
- Original
Joint Setting Table Operation path: [Project] - [Joint Setting Table]

Tool Number and Tool Definition
Match the tool definition of Safety motion and that of PAC program. If these two tool definitions are different, an error may occur in the safety motion.
We recommend to select a Tool number used in the safety motion at the beginning of the PAC program.
Sub Main
TakeArm Keep = 0
ChangeTool safetyinfo( 1 ) 'Change the Tool number to the one
'that the Safety motion currently handles.
・
・ 'Do not use Tool nor ChangeTool other than the beginning of PAC program.
・
End SubAuto Gain Tuning and Payload Estimation Function
Before performing Auto gain tuning, temporarily disable the monitoring function as follows.
1
Turn ON the Monitoring Disable input.
2
Perform Auto gain tuning or Automatic measure(payload estimation function).
3
Turn OFF the Monitoring Disable input.
Cooperative Control Function
Perform safety motion specification-dedicated wiring.
ID : 2495