
ID : 3047
Target Position Adjustment and Relative Motion of Circular Tracking
When adjust the target position or execute the relative motion while the circular tracking is operating, specify the offset value with the command of TrackShiftTarget or TrackDraw. This offset value at that time can be specified in the conveyor coordinates.
These commands are available in Ver.2.3.* or higher.
Conveyor Coordinates
In case of Circular Tracking, the coordinates can be defined as shown below.
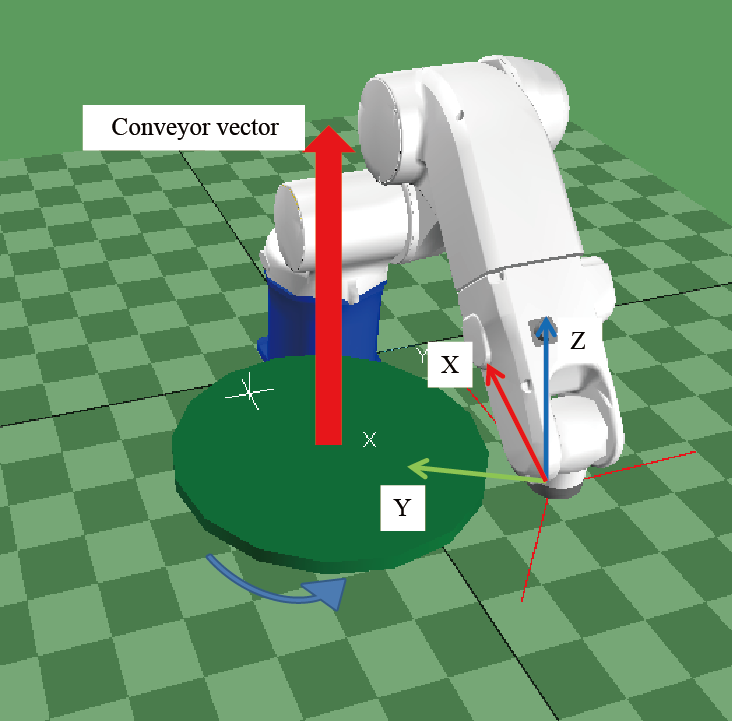
X axis, Y axis and Z axis are defined as follows: Axes except Z axis are calculated when executing the command.
| Axis | Definition |
|---|---|
| X axis | The tangential direction of turntable at the reference position (Turntable’s motion direction side) |
| Y axis | Vector jointing the reference position and the center of turntable |
| Z axis | Conveyor vector |
Reference position differs depending on commands as shown below.
| Command | Reference position |
|---|---|
| TrackShiftTarget | Current workpiece |
| TrackDraw | Current robot position |
Target Position Adjustment
When adjust the target position in the tracking motion as shown below, use the TrackShiftTarget command.
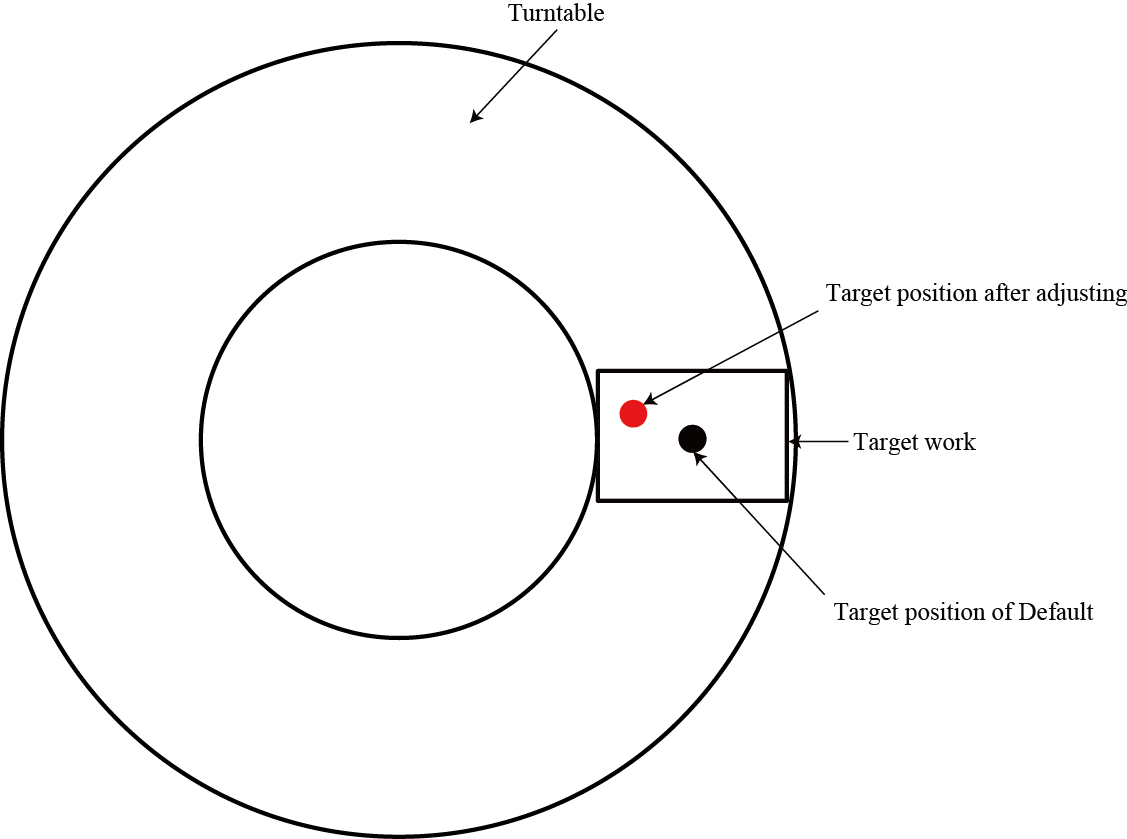
Programming Example
P10 = TrackTargetPos(1)
TrackShiftTarget 1, V(5, 10, 0)
TrackMove P, P10This exemplifies that a robot moves 5mm to Turntable against the target position of Default and the point of 10mm-offset towards the vector jointing the target position and the center of turntable, by using TrackMove.
Relative Motion
When execute the relative motion in the tracking motion as shown below, use the TrackDraw command.
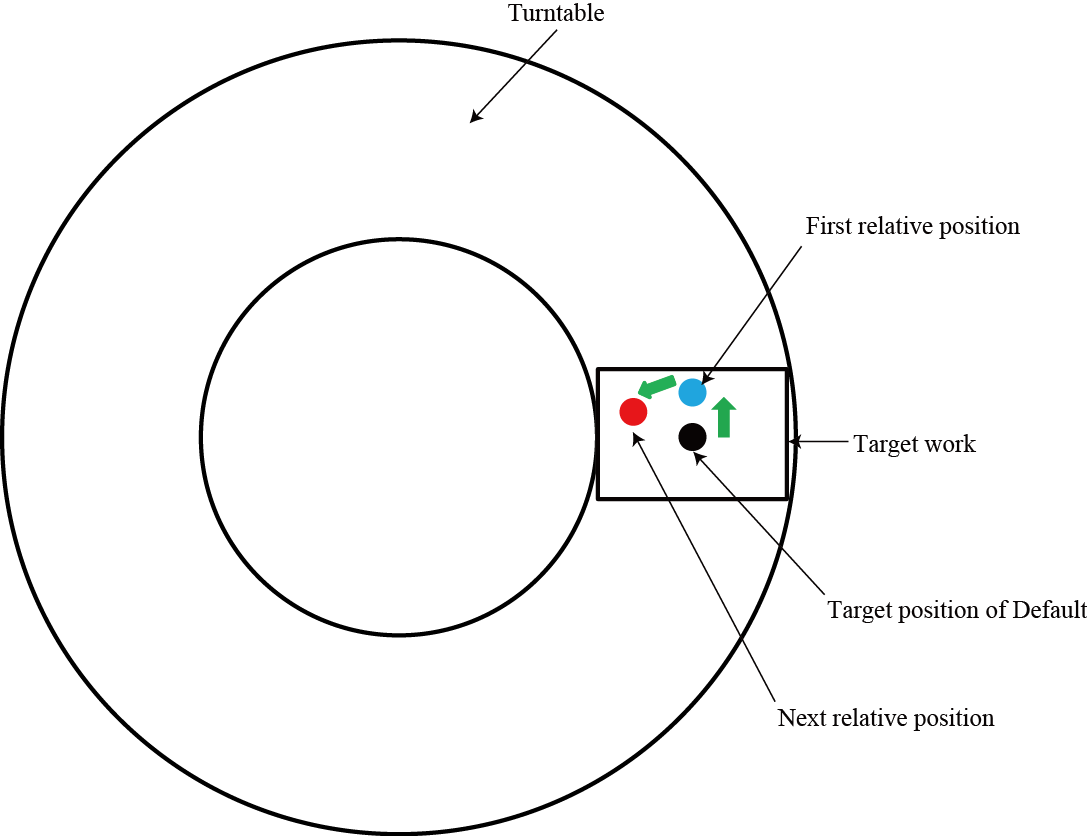
Programming Example
P10 = TrackTargetPos(1)
TrackMove P, P10
TrackDraw P, V(5, 0, 0)
TrackDraw P, V(0, 10, 0) This exemplifies that a robot moves the target position of Default by using TrackMove and moves 5mm to the tangential direction of turn table by using TrackDraw. Then the robot moves 10mm offset point towards the vector jointing the center of turntable by using TrackDraw.
ID : 3047