| Parameter name |
Data type / Description |
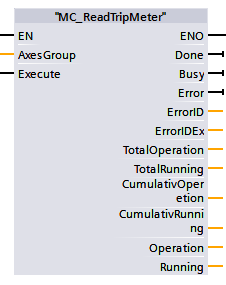
| Done |
Boolean |
- Execution completion confirmation
- True : This FB execution is completed.
False : This FB execution is not completed.
|
| Busy |
Boolean |
- Processing status of this FB
- True : Being executed.
False : Not being executed.
|
| Error |
Boolean |
- Error presence
- True : This FB ended abnormally.
False : This FB ended successfully.
|
| ErrorID |
Word |
- Error location
- 2800 (hexadecimal) : The error occurred in the PLC program.
2801 (hexadecimal) : The error occurred in the robot controller.
|
| ErrorIDEx |
DWord |
- Error Code
- This is a number to identify the error description.
For details, refer to "Error code list".
|
| TotalOperation |
DInt |
- Total operation
- Shows the grand total of the robot controller ON-time counted after the controller leaves the factory.
The unit is minute.
|
| TotalRunning |
DInt |
- Total running
- Shows the grand total of the robot running time counted after the robot leaves the factory.
The unit is minute.
|
| CumulativOperetion |
DInt |
- Cumu. operation
- Shows the total of the robot controller ON-time counted after you reset the user counter to zero.
The unit is minute.
|
| CumulativRunning |
DInt |
- Cumu. running
- Shows the total of the robot running time counted after you reset the user counter to zero.
The unit is minute.
|
| Operation |
DInt |
- Operation
- Shows the ON-time of the robot controller counted after it is turned ON this time.
The unit is minute.
|
| Running |
DInt |
- Running
- Shows the running time of the robot counted after the robot controller is turned ON this time.
The unit is minute.
|