
ID : 5608
Axis Number and LYZS Notation
The model of the transfer robot is determined by the selected robot type and strokes.
This page explains the Axis number and the LYZS notation that are related to the robot type and stroke selection.
Axis Number
The transfer robot allows customers to combine two to four axes, depending on the robot types. Axis numbers, written as J*, are assigned as shown below.
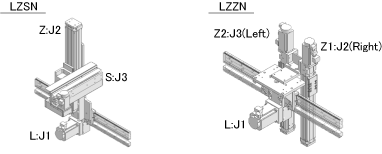
- The axis at the root, which slides along the rail of the rail unit, is called the J1.
- The one attached to the J1 axis is the J2 axis, followed by the J3 and J4 axes, respectively. If two or more axes are mounted on one axis, the rightmost axis is called the youngest axis number when viewed from the J1 motor.
LYZS Notation
To express the robot type, use the combination of four alphabets of L, Y, Z and S. The alphabets indicates the axis name, function and the axis number. From the leftmost, each alphabet represents J1, J2, J3 and J4.
Axis names and functions are as follows.
- L ・・・ L axis. Move linearly along the rail on the rail unit
- Y ・・・ Y axis. Move backward and forward
- Z ・・・ Z axis. Move vertically
- S ・・・ S axis. Move backward and forward with expansion and contraction
Since a robot type is expressed in a four-digit notation, a non-existent axis is called N.
Example: LZSN if J1 = L axis, J2 = Z axis, and J3 = S axis.
Axis Number and LYZS Notation Example
ID : 5608