
ID : 3483
Précautions à prendre lorsque le Robot est en Marche
- COBOTTA est conçu pour les utilisateurs âgés de 16 ans ou plus.
- Lorsque vous utilisez COBOTTA, la moitié supérieure du corps humain (doigts, mains, bras, poitrine, épaule, dos, abdomen et bassin) est plus susceptible d'entrer en contact avec COBOTTA.
Un "travail" tel que défini dans cette section comprend toutes les opérations telles que le transport, l'installation, l'assemblage des installations du robot, (câblage électrique, outil de montage ou effet final, tuyauterie d'air) le réglage, la procédure de correspondance anormale en cas de situations anormales, la maintenance, le nettoyage.
En outre, les travailleurs sont classés dans les catégories décrites dans la rubrique "Classification des Utilisateurs". Chaque utilisateur doit suivre une formation décrite dans la rubrique "Classification des Utilisateurs".
Installation de l'Équipement de Protection
- Les travailleurs doivent porter un équipement de protection, tel qu'un casque de protection, des chaussures et des lunettes de protection, conformément à l'évaluation des risques.
- Lors du traitement de la graisse, s'assurer de porter des gants et des lunettes de protection pour éviter que la graisse n'adhère à la peau et aux yeux.
Précautions d'Utilisation
- Ne placez pas votre corps sous le robot pendant le fonctionnement. Si le résultat de l'évaluation des risques de l'application indique la probabilité d'un contact avec le corps, s'assurer de prendre les mesures de protection nécessaires, telles que le port d'équipement de protection et l'installation de protecteurs.
- Ne pas mettre la tête dans l'espace restreint des robots.
- Pour éviter d'endommager le robot, n'exercez pas de force importante sur lui. Ne vous asseyez pas sur le robot et ne vous y accrochez pas.
- Faites attention à ce que les vêtements et les cheveux ne s'emmêlent pas.
- Si un frein est desserré, le bras du robot peut se déplacer de son propre poids. Lorsque vous relâchez un frein, veillez à soutenir le robot pour éviter de tomber.
- Si les travailleurs travaillent dans l'espace restreint, placez un interrupteur d'urgence près des travailleurs afin qu'ils puissent immédiatement arrêter le robot en cas d'urgence.
- Un robot chauffe pendant son fonctionnement. Si vous entrez en contact avec un corps de robot lorsque la température de l'environnement est élevée, vous pourriez vous brûler. Avant d’entrer en contact avec le robot pendant une longue période pour un apprentissage direct ou pour toute autre raison, éteignez l'appareil et attendez qu'il refroidisse.
Création d'une réglementation du travail et garantie de l'adhésion des travailleurs
Lorsque vous pénétrez dans l'espace restreint du robot pour effectuer des inspections d'enseignement ou de maintenance, établissez des "règles de travail" pour les éléments suivants et assurez-vous que les travailleurs les respectent.
- Procédures d'exploitation requises pour faire fonctionner le robot.
- Vitesse du robot lors de l'exécution de l'enseignement.
- Méthodes de signalisation à utiliser lorsque plus d'un travailleur doit effectuer un travail.
- Les mesures qui doivent être prises par le travailleur en cas de dysfonctionnement, suivant le contenu du dysfonctionnement.
- Les étapes nécessaires pour vérifier le déclenchement et la sécurité de l'état de dysfonctionnement, afin de redémarrer le robot après un arrêt du mouvement de ce dernier dû à l'activation du dispositif d'arrêt d'urgence.
- En dehors de ce qui précède, toutes les étapes ci-dessous sont nécessaires pour éviter tout danger dû à un mouvement inattendu du robot ou à un dysfonctionnement du robot.
- Affichage du panneau de commande.
- Assurer la sécurité des travailleurs effectuant des travaux dans l'espace restreint du robot.
- Maintien de la position et de la posture du travailleur. Position et posture permettant au travailleur de confirmer le fonctionnement normal du robot et de se réfugier immédiatement en cas de dysfonctionnement.
- Mise en œuvre de mesures de prévention du bruit.
- Méthodes de signalisation pour les travailleurs de l'équipement connexe.
- Types de dysfonctionnements et comment les distinguer.
Veuillez vous assurer que les "règles de travail" sont adaptées au type de robot, au lieu d'installation et au contenu de l'ouvrage.
Lors de l'élaboration de ces " règles de travail ", il est important de consulter les avis des travailleurs concernés, des ingénieurs du fabricant de l'équipement et d'un consultant en sécurité du travail.
Affichage du Panneau de Commande
Pour empêcher toute personne autre que le travailleur d'accéder accidentellement à l'interrupteur de démarrage ou à l'inverseur pendant le fonctionnement, affichez sur le panneau de commande ou la tablette un message indiquant qu'il est en fonctionnement. Prenez toute autre mesure appropriée, comme le verrouillage du couvercle.
Sécurité d'Installation et d'Utilisation de la Main (effecteur final)
- Lors de l'installation ou de l'utilisation de la main et de l'outil (effecteur final), s'assurer que la perte de puissance, les changements d'alimentation d'air ou de courant ne provoquent pas de conditions dangereuses. Sachez également qu'il peut y avoir de l'énergie résiduelle à l'intérieur de l'appareil.
- Si le client fournit le doigt de la pince de préhension en option, s'assurer que le doigt n'a pas de partie tranchante. Pour garantir la sécurité, assurez-vous d'effectuer l'évaluation des risques. De plus, lorsque le client prépare l'ensemble de la pince de préhension, assurez-vous d'effectuer l'évaluation des risques. En fonction des résultats de l'évaluation des risques, prendre les mesures de protection nécessaires, telles que l'élimination de la partie tranchante et la limitation de la force à 140 N ou moins.
- Lorsque vous concevez, créez et montez une pince ou une pièce, assurez-vous que la pince ou la pièce satisfait aux conditions spécifiées dans le manuel d'utilisation. Dans le cas contraire, le robot pourrait endommager le personnel ou lui-même. De plus, le robot sera hors garantie.
- Notez qu'un générateur de vide électrique risque de s’échauffer en fonctionnement continu. Si un opérateur doit entrer en contact avec un générateur de vide électrique pour remplacer une ventouse ou autre, attendez que le générateur refroidisse suffisamment.
- Ne pas regarder dans le trou d'entrée d'air d'un générateur de vide électrique. En raison de l'opération de soufflage ou d'autres opérations, les poussières accumulées dans le filtre du générateur électrique de vide risquent d’être évacuées.
Caméra
Lorsque le client fournit la caméra pour fixer le bras, assurez-vous d'effectuer l'évaluation des risques. Sur la base des résultats de l'évaluation des risques, prendre les mesures de protection nécessaires, telles que l'élimination des parties tranchantes. De plus, le client doit effectuer l'étalonnage car les données d'étalonnage de la caméra AF en option (N10-W02) ne peuvent pas être utilisées.
Paramétrage de la Limite de Vitesse
- Les paramètres de limitation de vitesse sont déterminés par le résultat de l'évaluation des risques.
- Avant d'envoyer des paramètres, vérifiez avec un outil de paramétrage COBOTTA si tous les paramètres sont correctement configurés. Pour plus d'informations sur la configuration d'un paramètre, reportez-vous au "Guide d'utilisation de l'outil de paramétrage COBOTTA"(PDF:2,639KB).
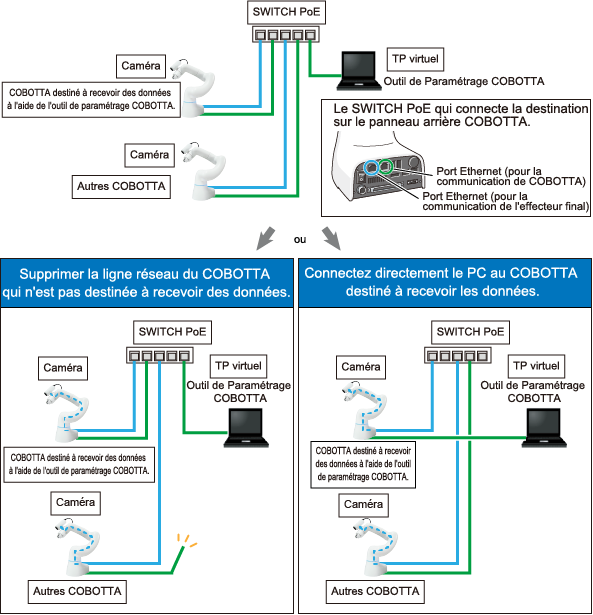
Dans le menu Aide, sélectionnez [Guide de l'utilisateur] pour ouvrir le guide de l'utilisateur.Lors de l'envoi des données de l'outil de paramétrage COBOTTA à COBOTTA, veillez à connecter l'outil de paramétrage COBOTTA et rassurez-vous que COBOTTA reçoit les données un par un.
Par exemple, si deux unités COBOTTA sont connectées à l'aide de SWITCH PoE, comme indiqué ci-dessous, reconnectez les unités en utilisant l'une des méthodes suivantes.
- Supprimer la ligne réseau du COBOTTA qui n'est pas destinée à recevoir des données.
- Connectez directement le PC au COBOTTA destiné à recevoir les données.
Après avoir envoyé les données de l'outil de paramétrage COBOTTA avec les connexions ci-dessus, veillez à rétablir les connexions dans leur ancien état.
- Après avoir envoyé un paramètre, vérifiez toujours que le robot se déplace comme prévu.
- Pour éviter un accident causé par le changement de paramètre, gardez votre mot de passe strictement confidentiel.
Inspections Avant le Début des Travaux
Avant le début des travaux, vérifiez les points suivants, effectuez les réparations immédiatement après la détection d'un dysfonctionnement et prenez toutes les autres mesures nécessaires.
- Vérifiez que la gaine ou le couvercle du câblage externe ou des dispositifs externes ne sont pas endommagés et vérifiez qu'il n'y a pas de connexion de câblage incorrecte.
- Vérifier que le robot fonctionne normalement ou non (bruits ou vibrations inhabituels pendant le fonctionnement).
- Vérifier le fonctionnement du dispositif d'arrêt d'urgence.
- Vérifiez qu'il n'y a pas de fuite d'air ou d'huile dans les tuyaux.
- Vérifiez qu'il n'y a pas d'objets obstructifs dans l'espace restreint du robot ou à proximité.
- Placez les interrupteurs d'urgence près des travailleurs afin qu'ils puissent les appuyer immédiatement en cas d'urgence.
- Le personnel qui n'est pas engagé dans l'opération ne doit pas rester dans l'espace restreint.
- Fixez le robot de manière à ce qu'il ne tombe pas ou ne se retourne pas.
Inspections Avant la Mise sous Tension
Pour éviter tout risque de choc électrique ou d'endommagement de l'appareil, avant d'allumer votre COBOTTA, vérifiez qu'il n'y a aucun dommage aux câbles ou aux fils.
Libération de la Pression d'Air Résiduelle
Avant de démonter ou de remplacer des pièces pneumatiques, commencez par relâcher toute pression d'air résiduelle dans le cylindre d'entraînement.
Essai Initial après l'Installation ou le Remplacement des Pièces
Après l'installation, le remplacement des pièces ou la mise à niveau de la version du logiciel, effectuez le test initial.
Effectuez les opérations suivantes pour le test initial.
- Effectuez les mêmes opérations que lors de l'inspection annuelle.
-
Vérifier que toutes les fonctions de sécurité fonctionnent normalement.
(Exemple : Lorsqu'un robot tourne à faible vitesse, appuyez sur le bouton-poussoir du boîtier d'arrêt d'urgence, puis vérifiez l’arrêt du robot.)
- Vérifier que tous les axes fonctionnent normalement en mode manuel.
Si le robot réussit toutes les vérifications ci-dessus, le test est positif.
Précautions à Prendre pour les Tests de Fonctionnement
Dans la mesure du possible, demandez au travailleur de rester à l'extérieur de l'espace restreint du robot lorsqu'il effectue des tests de fonctionnement.
Effectuer un premier test et un contrôle périodique pour confirmer l'efficacité de la mesure de protection. Les mesures de protection comprennent les interrupteurs d'arrêt d'urgence, les signaux d'arrêt de protection, les butées mécaniques et les fonctions de sécurité (SLS, SLT et SAL).
Précautions à Prendre pour Diagnostiquer un Mouvement
N'entrez pas dans la zone de mouvement du robot pendant le mouvement de diagnostic. Les robots peuvent avoir un comportement inattendu.
Précautions pour CALSET
Pendant la procédure de positionnement automatique CALSET, le robot peut présenter des mouvements inattendus. Ne pas entrer dans la plage de mouvement du robot.
Précautions pour le Mouvement de Posture de l'Emballage
Lors du mouvement de posture de l'emballage, des mouvements involontaires peuvent se produire. Ne pas entrer dans la plage de mouvement du robot.
Précautions pour le Démarrage du Programme
- Au démarrage
Avant de lancer un programme, assurez-vous que toutes les fonctions de sécurité et de protection fonctionnent correctement. De plus, vérifiez les points suivants, réglez les signaux et les signes à utiliser, et effectuez la pratique de signalisation avec tous les travailleurs concernés.
- Vérifier que les outils se trouvent à l'endroit prévu à cet effet.
- Vérifier qu'aucune lampe indiquant un dysfonctionnement du robot ou de l'équipement associé n'est allumée.
- Vérifiez qu'il n'y a personne autour du robot.
- Mesures à prendre en cas de dysfonctionnement
Arrêter le fonctionnement du robot en activant le dispositif d'arrêt d'urgence lorsqu'il est nécessaire d'entrer dans l'espace protégé avec une clôture de sécurité pour effectuer une maintenance d'urgence en cas de dysfonctionnement des robots ou des équipements associés.
Prenez toutes les mesures nécessaires, comme l'affichage d'un avis sur l'interrupteur de démarrage pour indiquer que des travaux sont en cours pour empêcher quiconque d'accéder au robot.
Précaution pour l'Interrupteur d'Alimentation
- Pour des raisons de sécurité, assurez-vous de couper l'alimentation électrique du COBOTTA en débranchant le connecteur d'alimentation ou en éteignant le disjoncteur préparé par le client avant toute opération de maintenance, de réparation ou de remplacement de pièces.
- Un interrupteur d'alimentation du COBOTTA est le deuxième disjoncteur. Un courant résiduel existe à l'intérieur du COBOTTA après la mise hors tension de l'interrupteur. Lors du fonctionnement, débranchez le connecteur d'alimentation ou coupez le disjoncteur de l'appareil pour vous assurer que l'alimentation électrique du COBOTTA est coupée.
- De plus, prenez d'autres mesures de sécurité, comme débrancher la fiche de la prise de courant afin que d'autres travailleurs ne puissent pas mettre l'appareil sous tension par inadvertance.
- Ne pas utiliser l'interrupteur d'alimentation du robinet d'alimentation comme disjoncteur.
Précautions à Prendre lors du Nettoyage
Assurez-vous d'éteindre le disjoncteur d'alimentation de l'installation avant de nettoyer le robot, les câbles et autres pièces ou de débrancher le connecteur d'alimentation.
Entreposage Sécuritaire des Tablettes
Afin d'éviter toute mauvaise utilisation, veuillez entreposer les tablettes inutilisées dans un endroit contrôlé.
Précautions à Prendre lors des Réparations
- N'effectuez pas de réparations en dehors de la plage prévue.
- Le mécanisme de verrouillage ne doit en aucun cas être retiré.
- Lors de l'ouverture du couvercle du COBOTTA, toujours éteindre le COBOTTA et débrancher le câble d'alimentation.
- Utilisez uniquement les outils de rechange spécifiés dans ce manuel.
Mesures à Prendre en Cas d'Urgence et de Défaillances
Décider des mesures à prendre par le personnel en cas d'urgence ou de dysfonctionnement, et les former à l'avance.
Dans le cas où une partie du corps d'un membre du personnel est piégée par COBOTTA,
- Relâchez un frein à l'aide d'une tablette, puis dégagez-vous. Pour savoir comment desserrer un frein, voir la section Réglage du Frein.
- Si un frein ne peut pas être desserré, tenez le bras et déplacez-le de force pour vous dégager.
Pour éviter les blessures, veillez à ne pas appliquer trop de force lorsque vous appuyez sur l'axe, en particulier pour les axes qui n'équipent pas le frein.
Le tableau suivant montre la durée de vie restante de chaque frein lorsque chaque axe est déplacé de 90°.
| Durée de vie du frein [nombre de fois] | |
|---|---|
| 1er axe | 350 |
| 2ème axe | 100 |
| 3ème axe | 200 |
| 4ème axe | 950 |
| 5ème axe | 1 000 |
| 6ème axe | - |
Le 6ème axe n'est pas équipé d'un frein.
Arrêts Mécaniques
Si le robot se heurte à un arrêt mécanique, il risque d'être endommagé. Vérifier les points suivants avant utilisation.
Suite au contrôle de l'état de l’arrêt mécanique, si vous constatez un mouvement involontaire du robot, tel qu'une perte de position, contactez notre service de maintenance.
-
Vérifier la position de l’arrêt mécanique
Relâchez d'abord les freins du COBOTTA, puis déplacez lentement le COBOTTA jusqu'à ce que chaque axe atteigne l’arrêt mécanique. Lorsque vous déplacez le COBOTTA, veillez à ne pas exercer une force excessive sur les arrêts mécaniques. Pour savoir comment desserrer un frein, voir la section Réglage du Frein.
Une fois que tous les axes atteignent les extrémités mécaniques, vérifier si l'écart angulaire entre la valeur d'angle actuelle de l’arrêt mécanique et la valeur de référence de l'extrémité mécanique est inférieur à 5 degrés dans chaque axe.
<Valeur de fin de référence mécanique>
+ côté - côté 1er axe +152,5 -152,5 2ème axe +102,9 -62,9 3ème axe +142,1 -15,9 4ème axe +172 -172 5ème axe +141,2 -101,2 6ème axe +173,5 -173,5 -
Vérifier le point enseigné
Déplacez le robot sur le point enseigné. Vérifier que la position finale de l'outil correspond au point enseigné.
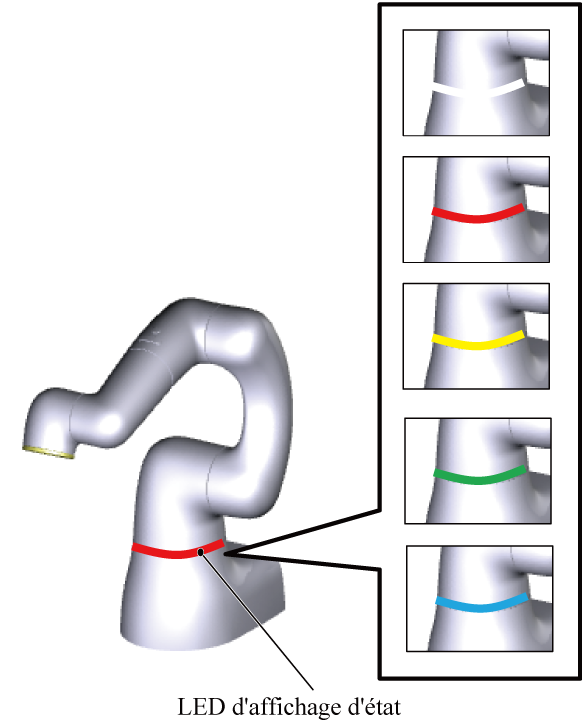
LED d'Affichage d'État
L'unité COBOTTA équipe une LED dont l’état s’affiche sur le corps. Il existe deux types de vitesse de clignotement : clignotement lent et clignotement rapide. Lorsque COBOTTA est en état de démarrage, les LED s'allument ou clignotent dans la couleur désignée.
Lorsqu'elle clignote rapidement, la LED s'allume et s'éteint à 360 millisecondes d'intervalle.
Lorsqu'elle clignote lentement, la LED s'allume et s'éteint à intervalles de 1440 millisecondes.
Pour le mode d'affichage d'une LED correspondant à l'état COBOTTA, se reporter à la section "Mode d'affichage des LED et de l'état COBOTTA" décrite ci-dessous.
- Si la LED ne s'allume pas ou ne brille pas complètement dans la couleur indiquée, il se peut que la LED ne fonctionne pas correctement. Arrêtez immédiatement le robot et contactez notre service de maintenance.
- La LED joue un rôle important pour vérifier l'état de fonctionnement du COBOTTA. Lors de l'entretien quotidien, vérifier l'état d'éclairage de la LED. Pour plus d'informations sur la vérification de l'état de la LED, reportez-vous à la section "Comment Vérifier le Statut de la LED d'Affichage d''État".
La LED d'affichage d'état, comme indiqué ci-dessus, est une LED pour afficher l'état de COBOTTA lui-même. Ce n’est pas une LED pour afficher l'état de l'ensemble du système. Par exemple, même si l'interrupteur du boîtier d'arrêt d'urgence est actionné pour une raison quelconque, si l'état du COBOTTA n'est pas modifié, la LED d'affichage d'état ne change pas.
Mode d'affichage de l'état des LED et du COBOTTA
| Statut | Robot | LED | Recours/Note | ||
|---|---|---|---|---|---|
| Initialisé | Mise sous tension | Vert foncé | Clignotement lent | - | |
| Normal | Enseignement direct | Sous enseignement direct | Bleu | Allumé | - |
| Proche de la limite du logiciel | Jaune | Clignotement lent | - | ||
| Le bras COBOTTA dépasse une limite logicielle | Jaune | Clignotement rapide | Déplacez le bras à l'intérieur de la limite du logiciel. | ||
| Proximité du point singulier | Jaune | Clignotement lent | - | ||
| Mode de préparation directe | Bleu | Clignotement lent | - | ||
| Le programme est en cours d'exécution | En mode de démarrage lent (SS) | Blanc | Clignotement rapide | - | |
| Le programme est en cours d'exécution | Blanc | Allumé | - | ||
| AutoCAL | AutoCAL est en cours d'exécution | Blanc | Allumé | - | |
| Diagnostic du mouvement | Le mouvement de diagnostic est en cours d'exécution | Blanc | Allumé | - | |
| Fonctionnement manuel | Sous commande manuelle (Déplacement vers la position spécifiée par la variable) |
Blanc | Allumé | - | |
| Autres | Réponse à la connexion du dispositif d'exploitation | Vert | Clignotement rapide | Si le jeton exécutable est réglé sur une valeur autre que "TP", la LED s'allume en vert. | |
| En attente de la fin de la connexion du périphérique d'exploitation | Vert | Clignotement lent | |||
| Connexion au dispositif d'exploitation | Vert | Allumé | - | ||
| Erreur | Jaune ou Rouge | Allumé | Effectuer les étapes nécessaires en fonction de la liste des codes d'erreur. | ||
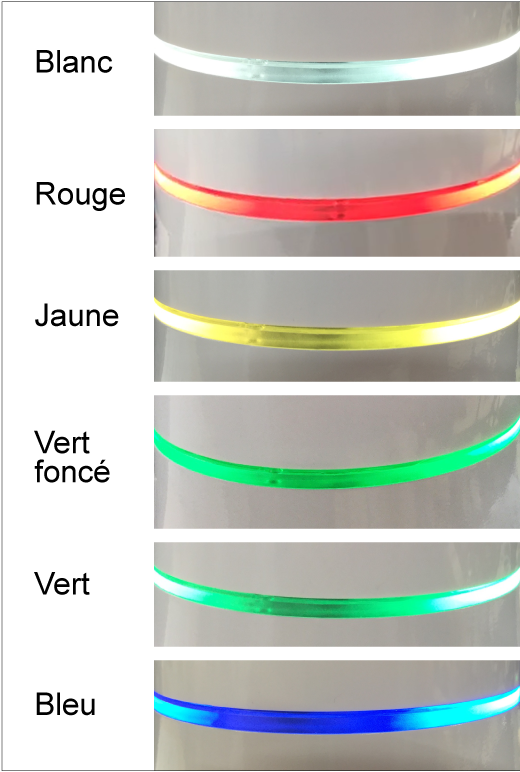
Ce qui suit montre l'échantillon de couleur de la LED.
Les couleurs peuvent être différentes des couleurs réelles en fonction du moniteur que vous utilisez et/ou des conditions d'éclairage de l'environnement.
ID : 3483