
ID : 4095
Brake Setting
Operation path : [F2 Arm] - [F12 Maintenance] - [F1 Brake]
Set brake for each joint of robot.
Press [F1 Brake] to display the following [Brake setting] window.
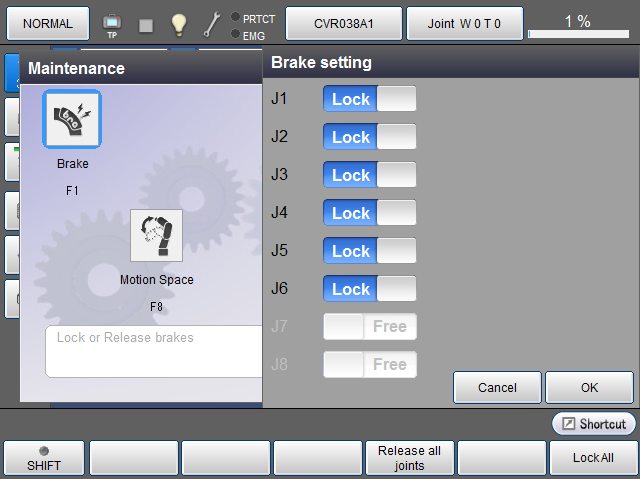
To unlock/lock brakes only for some joints, select unlock or lock by directly touching the Lock/Free display of corresponding joints on the Remote TP/Virtual TP.
The brakes of robot is actually unlocked or locked when [OK] is pressed in [Brake setting] window.
| Available function keys | |
|---|---|
| [F4 Release all joints] |
Press this key to change the display of brake for all joints to Free. Then, press [OK] to unlock brakes for all joints. |
| [F6 Lock All] |
Press this key to change the display of brake for all joints to Lock. Then, press [OK] to lock brakes for all joints. |
ID : 4095