
ID : 7320
Slow Start (SS) Function
Overview
If this function is used, when a robot has been stopped for a certain period of time, the robot starts its motion with a slower speed after the stop.
The robot moves with the slower speed within a predetermined time period after the motion start. Once the predetermined time period elapses, the robot runs with the normal operation speed.
This function is available in Ver.2.7.* or higher.
To check the currently used parameters with Remote TP/Virtual TP, click [Help] - [Parameter confirmation] - [Other] tab.
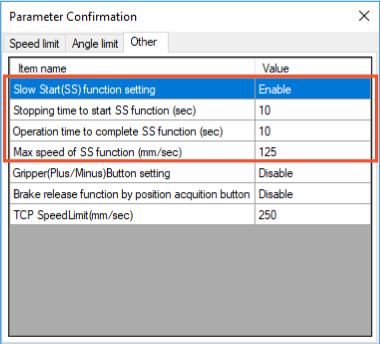
| Item | Initial value | Description |
|---|---|---|
Slow Start (ss) function setting |
Enables | Enables (use) /Disables (not use) this function enable. |
| Stopping time to start SS function (sec) | 10 | When the Slow Start function is enabled, if a robot has been stopped for more than the specified period of time, the robot will start moving with a slower speed. However, under the following conditions, the robot starts with the slower speed, regardless of the setting value.
Enter the value between 1 to 3600 (second). |
Operation time to complete SS function (sec) |
10 | When the specified period of time has elapsed from the start of the slower speed motion, the robot resumes its motion with normal speed (user’s defined speed). Enter the value between 1 to 3600 (second). |
Max speed of SS function (mm/sec) |
125 | The maximum speed at the Slow Start motion. Enter the value between 50 to 250 (mm/sec). |
Example
Each parameter can be changed with the COBOTTA parameter tool.
Indication with Status display LED
In general, while a user program is running, the status display LED on the robot body lights white.
While a robot runs with a slower speed by Slow Start function, the status display LED blinks white.
Slow Start function unavailable conditions
Regardless of the parameter setting, the Slow Start function is not available under the following conditions.
- Robot motion of manual operation
- Robot motion of variable move (moving to the variable-specified position).
- CALSET execution at the startup
- Simulation function with WINCAPSIII
- Machine lock operation
Precautions for Use
We do not guarantee you that the use of this function prevents any collision between human and robot. Before you execute a user program, make sure that there is no personnel near the robot.
Set each parameter value according to your application environment. If you use this function with the factory default parameter setting, depending on the customer’s environment, a robot may collide with operators.
ID : 7320