
ID : 1942
Difference in Robot Motion when Driven in Tool Coordinates and Work Coordinates
In Manual mode, if you choose Tool mode on the teach pendant, the robot will run in tool coordinates. If you choose X-Y mode, the robot will run in work coordinates.
Robot Motion Manually Driven by X, Y, and Z Keys
The figure below shows the differences in robot motion when the robot is driven in tool coordinates and work coordinates, by using the X, Y, and Z keys.
| X-Y mode (in work coordinates) | Tool mode (in tool coordinates) | ||
|---|---|---|---|
| X± | 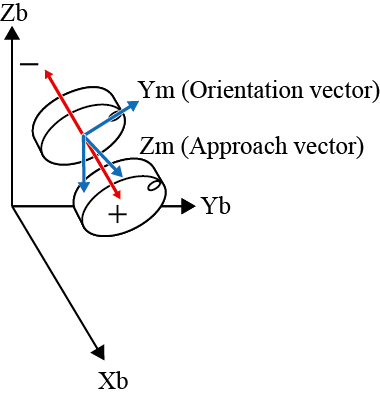 |
X± | 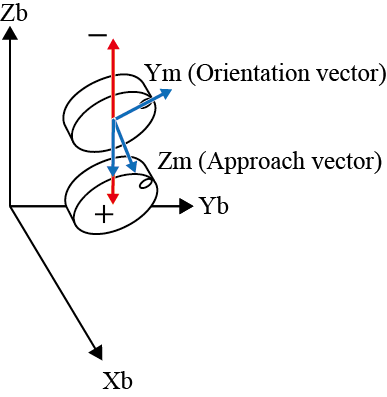 |
| Y± | 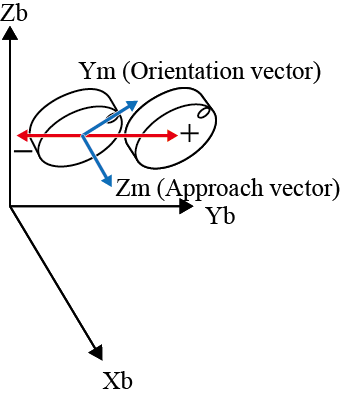 |
Y± | 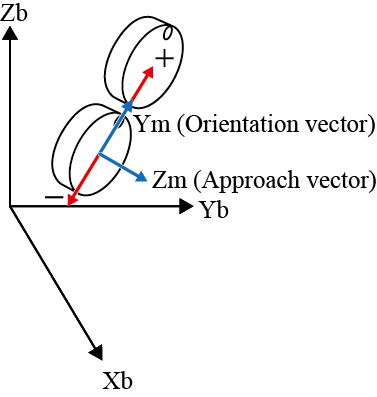 |
| Z± | 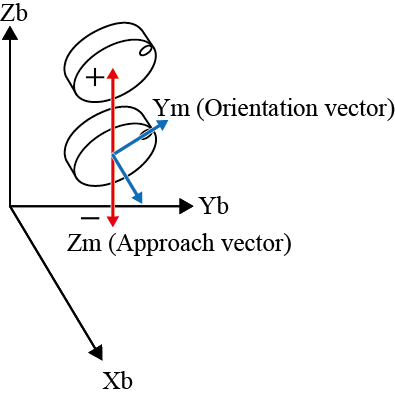 |
Z± | 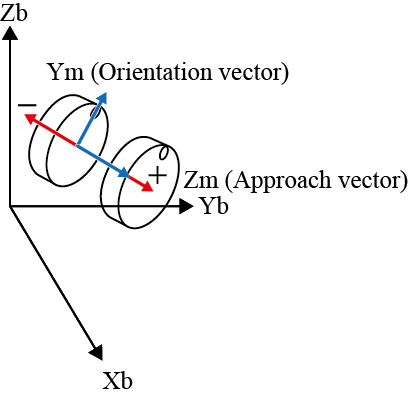 |
Robot Motion Manually Driven by RX, RY and RZ Keys
The figure below shows the differences in robot motion when the robot is driven in tool coordinates and work coordinates, by using the RX, RY and RZ keys.
| X-Y mode (in work coordinates) | Tool mode (in tool coordinates) | ||
|---|---|---|---|
| RX± | 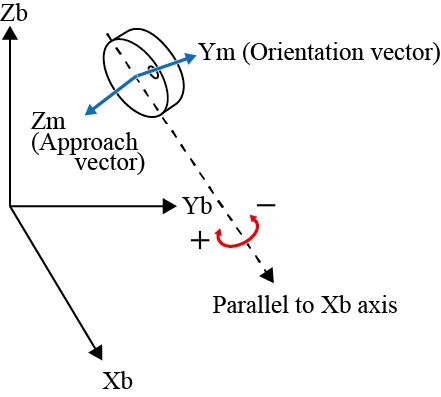 |
RX± | 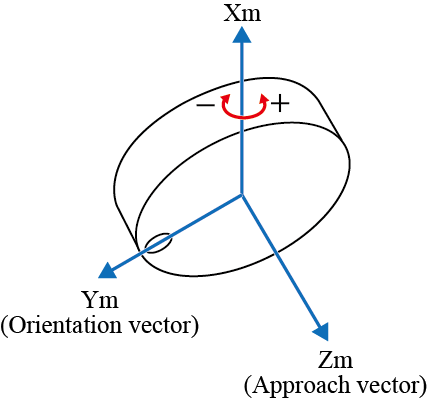 |
| RY± | 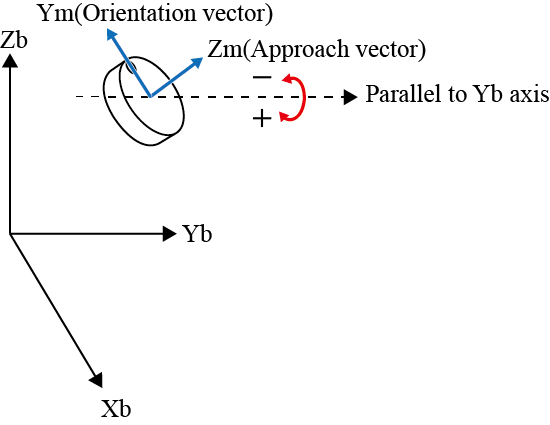 |
RY± | 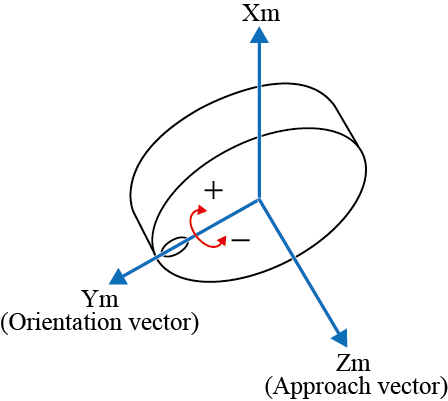 |
| RZ± | 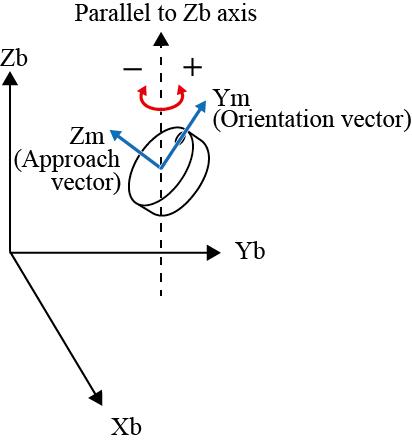 |
RZ± | 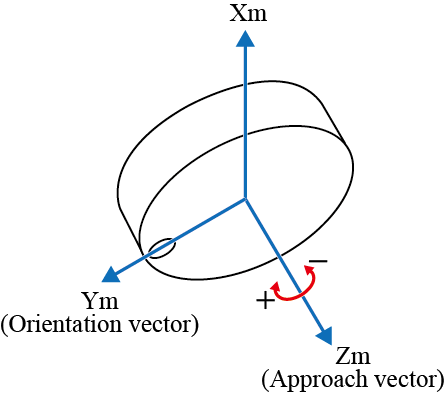 |
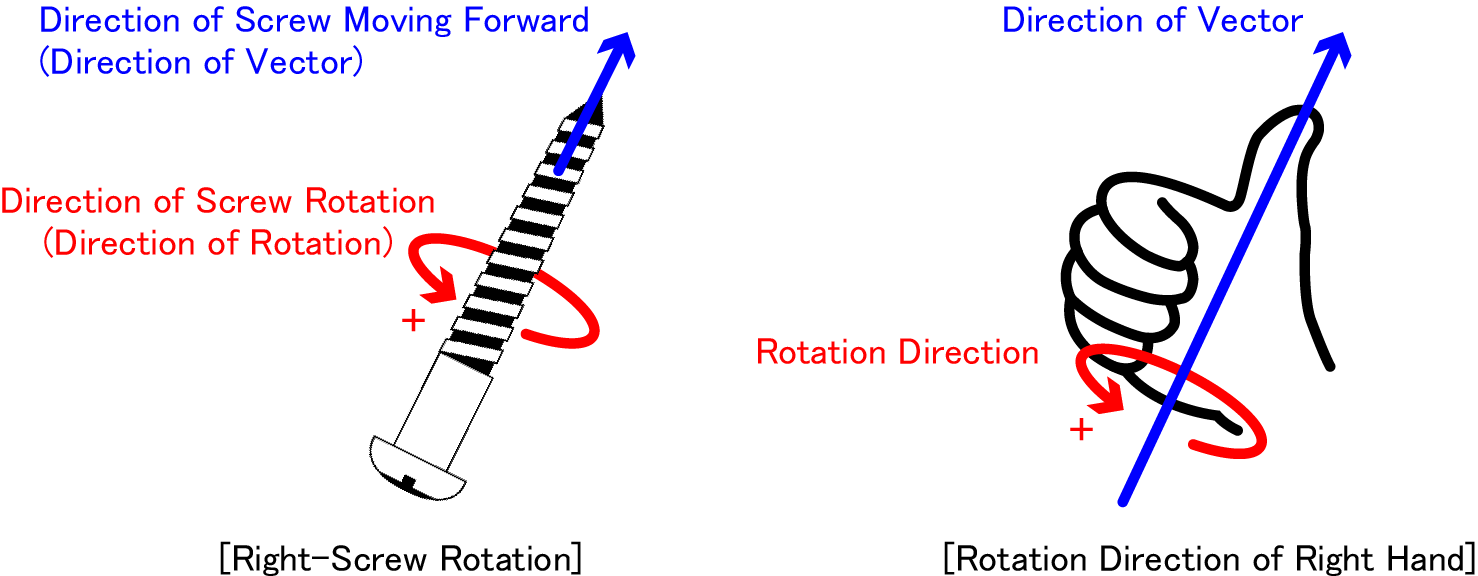
The + rotation is for clockwise and the - rotation for counterclockwise with respect to the vector.
"Clockwise rotation" is based on a principle where a screw can rotate clockwise to screw into a board.In this case, the moving direction of a screw is the vector, and clockwise rotation of a screw is the rotating direction.
"Clockwise rotation" is also called "right hand rotation".In "right hand rotation", the right hand is held with the thumb up.The direction of the thumb is the vector, and the direction of the rest fingers is the rotating direction.
ID : 1942