
ID : 1946
Advantages of Tool Coordinates
This section describes what advantages you may have by using tool coordinates.
In Manual Operation or in Teaching
When running the robot in tool coordinates manually, you can directly handle the end-effector mounted on the flange, making teaching easier.
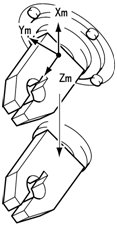
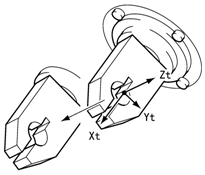
The figure below shows the comparison of robot moving paths between in mechanical interface coordinates and in tool coordinates.
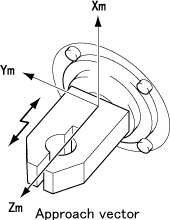
| In mechanical interface coordinates (TOOL0) | In tool coordinates (TOOLn where n is any of 1 to 63) |
|---|---|
If X- key is pressed:
|
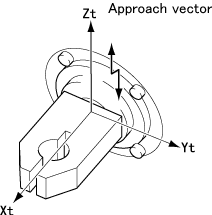
If Z- key is pressed:
Enables you to move the end-effector to your object point in teaching. |
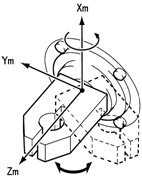
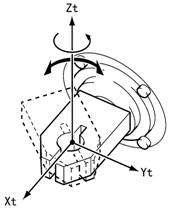
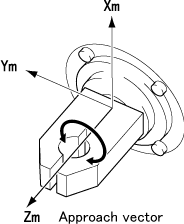
If RX+ key is pressed:
|
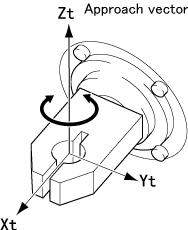
If RZ+ is pressed:
Enables you to rotate the end-effector around the Zt axis. |
In Programmed Running
Using APPROACH or DEPART command
APPROACH or DEPART command controls the robot movement on the Z axis of the tool coordinates. You can arbitrarily define the Z-axis orientation in the tool coordinates, allowing you to easily control the end-effector. The figure below shows an example of the tool coordinates definition.
TOOL0 (mechanical interface coordinates) |
Changing the Z-axis orientation by tool coordinates definition |
Using ROTATEH command
ROTATEH command controls rotation around the Z axis of the tool coordinates. You can arbitrarily define the Z-axis orientation in the tool coordinates, allowing you to easily control the end-effector. The figure below shows an example of the tool coordinates definition.
TOOL0 (mechanical interface coordinates) |
Changing the vector orientation and offsetting the coordinate origin by tool definition |
ID : 1946