
ID : 4863
Test for deterioration
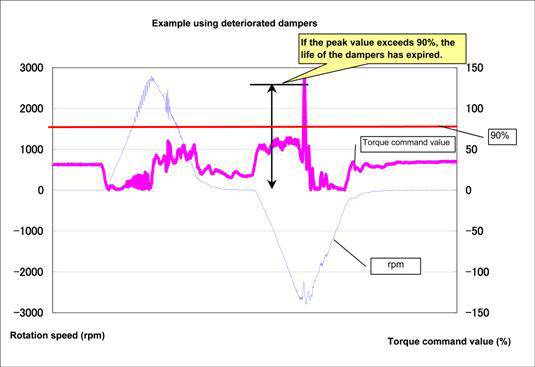
To check the deterioration of dampers, see the single joint servo log (torque command value %) when the robot is in motion.
If the dampers have deteriorated, the torque command value (current) increases.
A guide for replacement is 90% of the maximum current. If the peak value exceeds 90%, replace both dampers.
Keeping a Joint Servo Log
Use a single joint servo log program and Teach Pendant to keep a single joint servo log.
For details, refer to the "Acquiring, Displaying and Saving Servo Log" of "Teach Pendant Operation Guide".
1
Create a logging program, referring to the sample program given below.
Sample Program for Logging Single Joint Servo
'!TITLE "absorber"
Sub Main
Takearm Keep = 0
Speed 100
Move P, P50
Syslog.Servo.Clear
Syslog.Servo.Start
Delay 200
Move P, P51
Delay 200
Move P, P50
Delay 400
Syslog.Servo.Stop
Givearm
End SubIn the sample program above, set P50 and P51 to use the full stroke of the Z axis within the normal operation range.
2
Carry out the program.
3
Acquire a servo log by teach pendant.
Press : [F2 Arm]-[F3 Servo State]-[ServoLog tab]
To display the following [ServoLog], press [ServoLog tab].
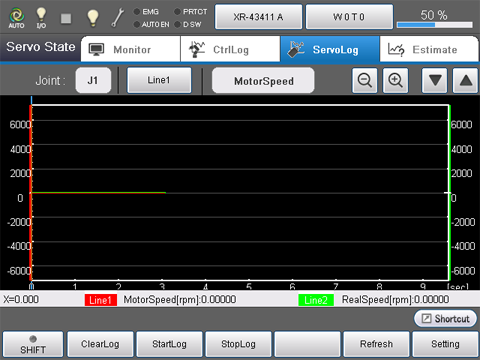
4
After changing drawing axis J3 and position deviation to [Torque], then press [Refresh] to confirm the torque value.

ID : 4863