
ID : 5231
Movement in the Z-Axis Direction (Approach and Depart commands)
If a robot moves to a target position freely when it holds or places a workpiece, it might collide with peripheral devices and equipment. To prevent such collision, move the robot hand to the approach position that is away from the target position first, stop the position for a period of time, and then move to the target position straightaway.
Also, when the robot hand leaves the target position, the hand moves to the depart position straightaway first, and then starts moving to the next target position.
Since it is difficult to figure out the depart and approach positions manually, Approach command and Depart command are prepared to calculate these positions automatically.
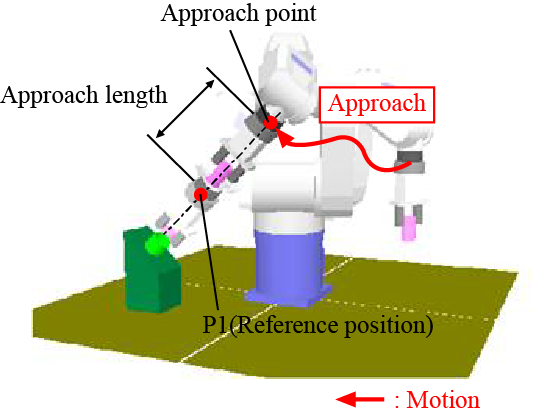
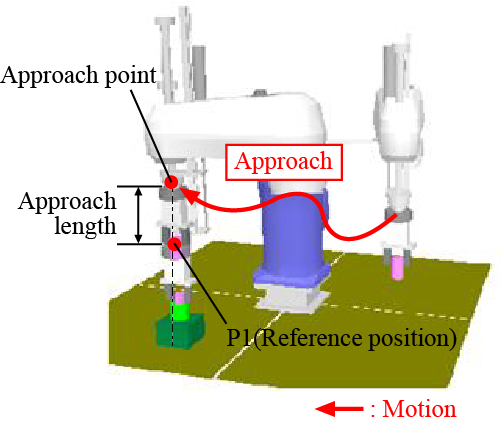
Approach in the Hand Direction (Approach command)
Function
Move the tool end to the Approach point that is specified distance away from the reference position in the Z-axis direction of the Tool coordinate.
Syntax
Approach motion interpolation, reference position, approach length [, motion option]Description
- Motion interpolation is either P (PTP control) or L (CP control).
- Reference position can have the position, joint, or homogeneous transform matrix type of data.
- Designate an approach length by single precision real number type data. Target position option can be added to the approach length.
- Motion option are the same as in the Move command.
Example
Approach P, P1, @P 50
'Move the tool end to the negative Z-axis direction by 50mm from variable P1
'in path motion under PTP controll| 6-axis robot | 4-axis robot |
|---|---|
 |
 |
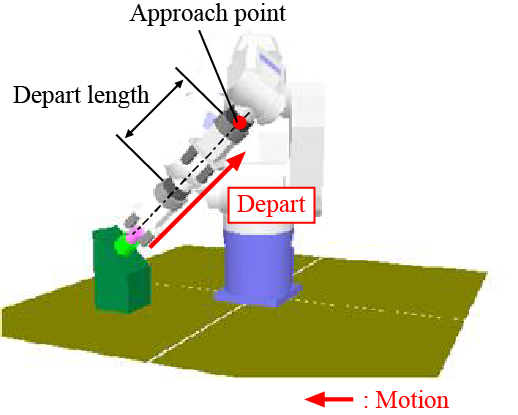
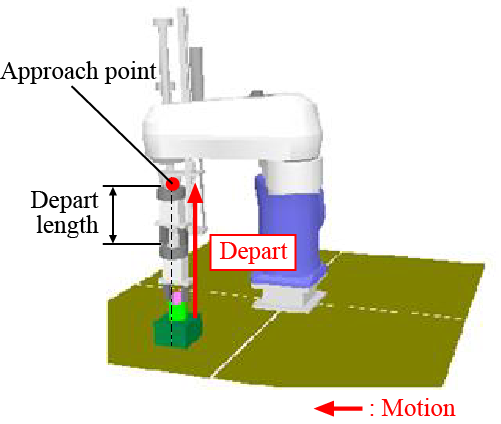
Dodging Movement in the Hand Direction (Depart command)
Finction
This command moves the tool end to the depart point that is specified in the - Z-axis direction and <depart length> away from the current position. This command is commonly used when departing from the target object.
Syntax
Depart motion interpolation, depart length [, motion option]Description
- Motion interpolation is either P (PTP control) or L (CP control).
- Designate an depart length by single precision real number type data. Target position option can be added to the depart length.
- Motion option are the same as in the Move command.
Example
Depart L, @P 50
'Move the tool end to the negative Z-axis direction by 50mm from variable P1| 6-axis robot | 4-axis robot |
|---|---|
 |
 |
ID : 5231