
ID : 2697
Record the Control Log
Home Position Guidance function generates a trajectory so that the robot does not interfere with peripheral devices, referring to the control log during automatic operation. Therefore, before you execute the Home Position Guidance, you need to record the home position and the log.
Start the recording of the control log by PacScript command "SysLog.Ctrl.Start". Also, stop the recording of the motion log by "SysLog.Ctrl.Stop".
If you use the teach pendant, record the control log by [Start Log] and [Stop Log] of the control log tab.
For details of the target log data, refer to "Recording by Program Commands".
SysLog.Ctrl.Start
Start the recording of the control log. Before using the command, clear the control log.
Once the available recording time elapses, it will be overwritten from the oldest record.
For details of the command, refer to "SysLog.Ctrl.Start" of Command Reference.
When the Log Exceeds Buffer Size
If it exceeds the upper limit of the available recording time of the control log, it will be overwritten from the oldest record.
In some cases, the control log to the specified home position may be deleted in the middle. In that case, the actual home position is the oldest record point among the control log to the specified home position.
SysLog.Ctrl.Stop
Stop the recording of the control log.
For details of the command, refer to "SysLog.Ctrl.Stop" of Command Reference.
From the teach pendant
You can record the control log by the following operation path.
Operation path : [F2 Arm] - [F3 Servo State] - [CtrlLog tab]
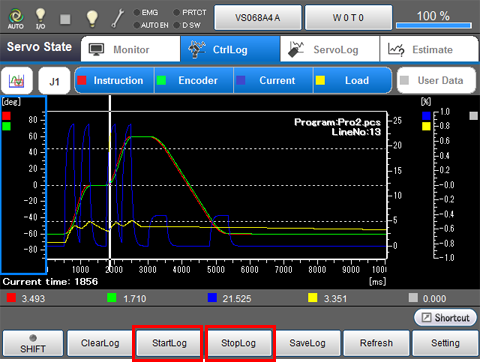
| Available function keys | |
|---|---|
| [F2 Start Log] |
Starts acquiring control log. REC on the icon of control log tab turns on when the acquisition of control log is started. |
| [F3 Stop Log] |
Stops acquiring control log. REC on the icon of control log tab turns off when the acquisition of control log is completed. |
ID : 2697