
ID : 2714
Function to Detect Approaching Virtual Fence
This is a function to make enable reaction force on the operating COBOTTA side when the slave robot approaches the virtual fence if the virtual fence is set for the slave robot.
Setting Method
Setting of COBOTTA Side
1
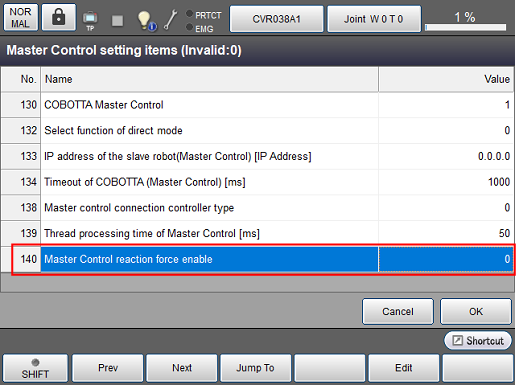
Operation path:[F6 Setting] - [F10 COBOTTA] - [F8 Master Setting]
In the Master Control setting items window, select No.140 [Master Control reaction force enable] and press [F5 Edit].
2
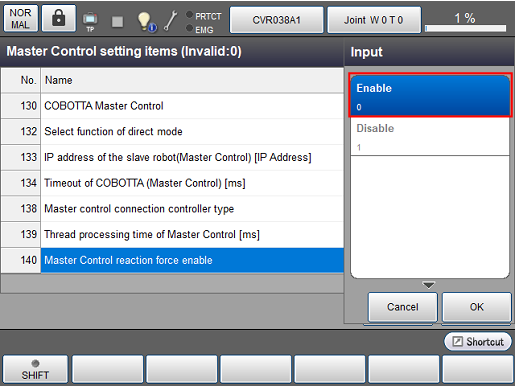
Select [0 : Enable] and press the [OK] button.
3
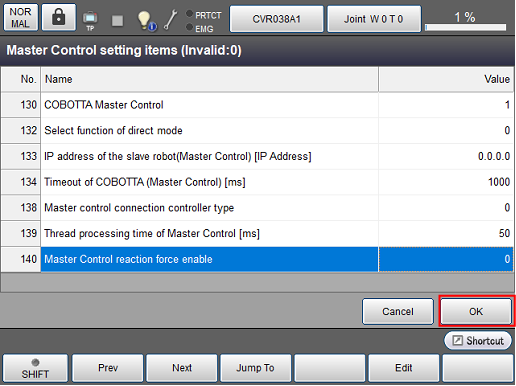
Press the [OK] button.
Setting of Slave Robot Side
It is assumed that setting of the virtual fence has been completed.
For setting of the virtual fence, refer to "Virtual Fence".
1
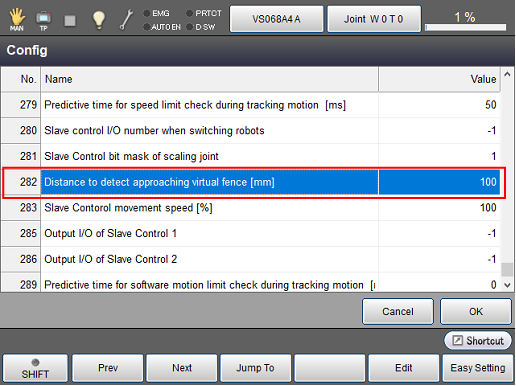
Operation path:[F2 Arm] - [F6 Aux] - [F1 Config]
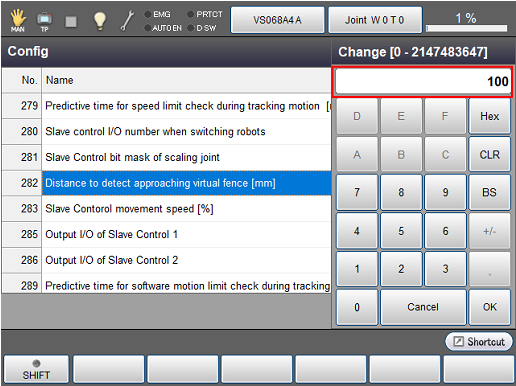
In the Config window, select No.282 [Distance to detect approaching virtual fence] and click [F5 Edit].
2
Set a value of distance from the virtual fence to make COBOTTA enable reaction force.
After setting is completed, press the [OK] button.
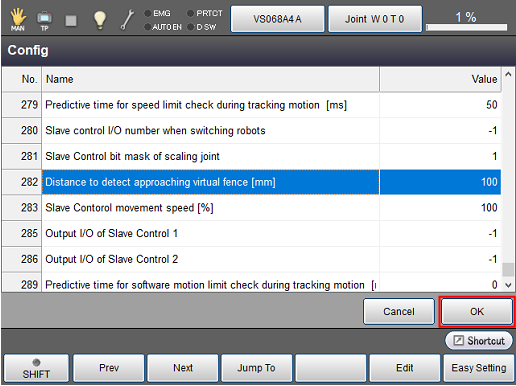
3
Press the [OK] button.
ID : 2714