
ID : 2987
MC_ReadAxesGroup
To obtain information, such as the robot motion status, from the robot controller and store it to the variable "Robots[n]" in the data block "DB_DENSO_ROBOTS (DB2990)."
| Graphic expression | FB No. | FB category |
|---|---|---|
 |
FB2301 | Unique |
Input parameter
| Parameter name | Data type | Valid range | Default | Omission (*) |
|---|---|---|---|---|
| AxesGroup | Integer | 1 or larger | 1 | No |
|
||||
| InAddress | HW_IO | - | - | No |
|
||||
(*) : For some parameters, entries can be omitted.
- Yes : Entry can be omitted.
- No : Entry required always.
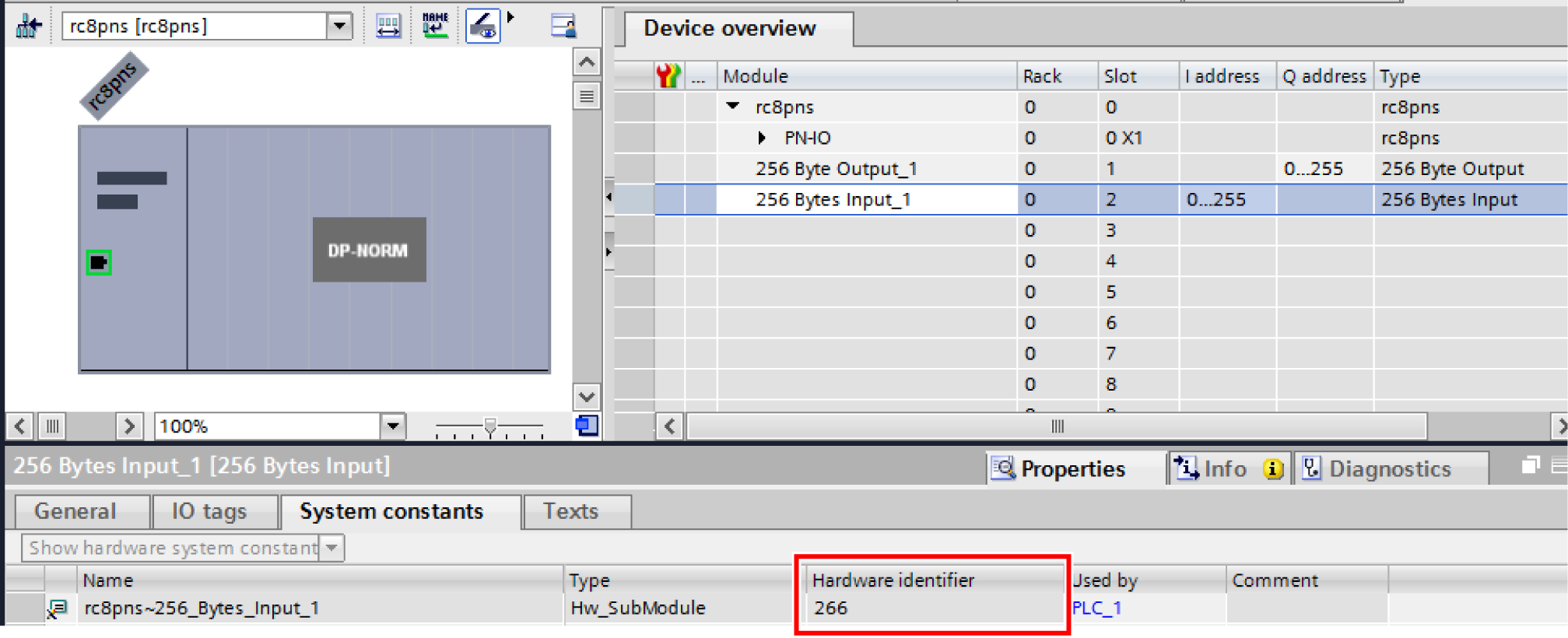
About hardware identifier
The hardware identifier is a number automatically assigned to each device by "TIA Portal V14" when CPU (PLC) hardware configuration is performed in "TIA Portal V14".
Since robot controller input data is set as the PROFINET IO input module, specify the hardware identifier of the input module in the input parameter "InAddress".
For example, to configure the settings shown in the figure below, specify "266" in the input parameter "InAddress".
Output parameter
-
Function description
In practice, the robot controller information is stored to the variable "Status" in the variable "Robots[n]" in the data block "DB_DENSO_ROBOTS (DB2990)."
Attention
The value of the variable "Status"(*1) updated in this FB is used to control the robot by other FB of Command-Slave. If the value of the variable "Status" is old, the robot may not be controlled properly by other FB of Command-Slave.
For this reason, place this FB at the beginning of the program and always set the input parameter "EN" to TRUE.
*1: The variable "Status" is located in the variable "Robots[n]" in the data block "DB_DENSO_ROBOTS (DB2990)".
ID : 2987