
ID : 5465
Using a WACOH-TECH Force Sensor
This page describes details of the devices necessary for the force sensor-based force control function using a force sensor manufactured by WACOH-TECH Inc.
Available Force Sensor
Among DynPick WEF-6A series (manufactured by WACOH-TECH Inc.), the following models are available for the force sensor–based force control function.
| Model /External view | Connector case (*1) | Rated load | Outline drawig | |
|---|---|---|---|---|
| Translational force [N] | Moment [Nm] | |||
|
WEF-6A200-4-RCD
|
Not equipped | ±200 | ±4 | refer to (PDF:157KB) |
|
WEF-6A200-4-RCD-B
|
Equipped | refer to (PDF:158KB) | ||
|
WEF-6A500-10-RCD-B
|
±500 | ±10 | ||
|
WEF-6A1000-30-RCD-B
|
±1000 | ±30 | refer to (PDF:157KB) | |
WEF-6A200-20-RCD-B
|
±200 | ±20 | refer to (PDF:162KB) | |
Common Specification
|
||||



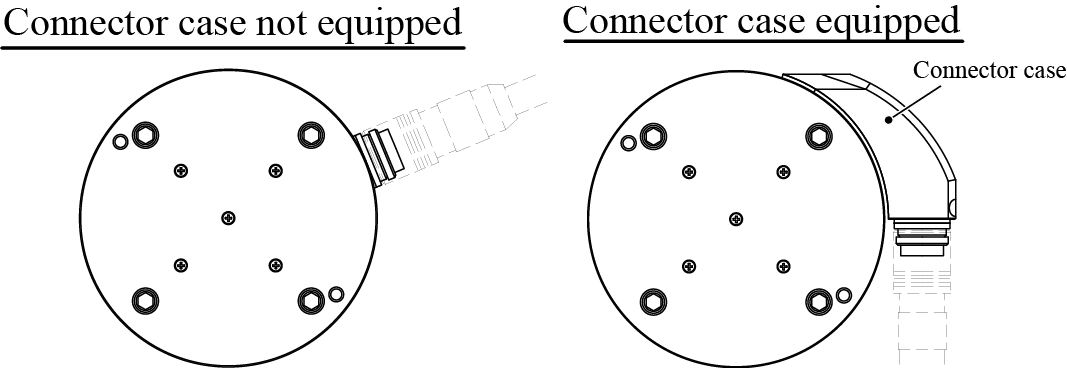
*1: A connector case allows the connection direction of the sensor connector to turn into the sensor's circuit direction.
*2: For detailed information about the force sensor Dyn-Pick, refer to the user's manual of "Capacitive 6-axis force sensor WEF-6A series" manufactured by WACOH-TECH Inc.
For information about the user's manual of force sensor, please contact to WACOH-TECH Inc. .
Periodically check the force sensor.
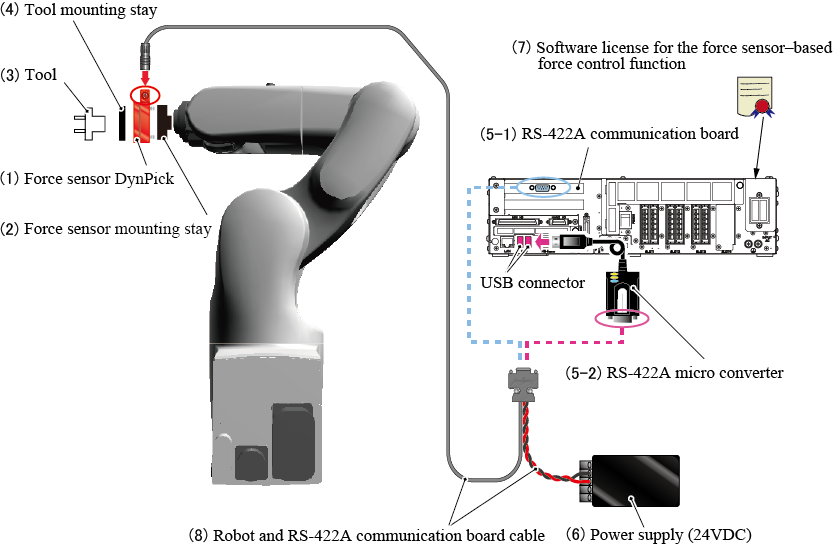
System Configuration
The following image shows the system configuration.
Only when the robot is VS-series having a communication interface flange-A, you can use the internal wiring of the robot as a wiring between a robot controller and a force sensor.
For details, please refer to "Cable Connection Using an Internal Wiring".
| Components / Manufacturer /Model(Part number) |
Description | ||||
|---|---|---|---|---|---|
(1) Force sensorWACOH-TECH Inc.
|
This is a capacitive force sensor, Dyn-Pick. Select a force sensor according to your application. |
||||
(2) Force sensor mounting stay(made by customer) |
A stay for fixing a force sensor to the end of the robot arm. For details, refer to "How to Install a Force Sensor". |
||||
(3) Tool(selected by customer) |
Select a tool according to your application. | ||||
(4) Tool mounting stay(made by customer) |
A stay for fixing a tool to the force sensor. Create a stay with referring to the outline drawing of Available force sensor. |
||||
|
The following two devices are available for the Force sensor and robot controller connection.
|
|||||
(6) Power supply (24V DC)(selected by customer) |
A power supply to supply electricity to the force sensor. Connect two lines (red and black lines) of a force sensor and RS-422A communication board cable.
For detailed information, please refer to the user's manual of DynPick Capacitive 6-axis force sensor WEF-6A series. For about user's manual of force sensor, please contact to WACOH-TECH Inc. Be careful not to connect a red line (+24 V) and a black line (0 V) incorrectly as this may result in damage to the force sensor. |
||||
(7) Software license for the force sensor–based force control functionDENSO WAVE Inc.
|
These are DENSO products. These licenses are required to use the force sensor–based force control function. "Compliance function-activated" targets a newly purchased robot set. Ordering this option with a robot set will activate the function before shipment. Please order this option with a robot set. For how to activate the function, refer to “Activating the Function”. |
||||
(8) Force sensor and RS-422A communication board cableWACOH-TECH Inc.
|
A cable to connect an RS-422A communication device (RS422-A communication board or RS-422A micro converter) and 24VDC regulated power supply to a force sensor. |
||||
ID : 5465