
ID : 2667
Motion Check of the Program
You can check the cycle time, trajectory and posture of the robot by running the created program on the program.
1
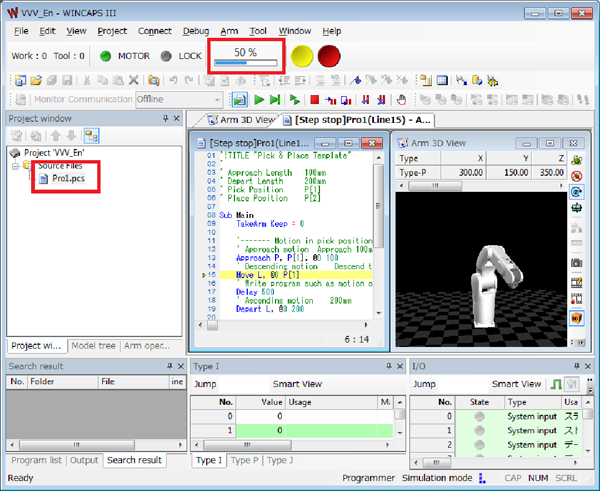
On the [Project window], select a program that you would like to check the motion.
The selected program is displayed.
2
On the [Debug] menu, click [Simulation mode].
3
Set the external speed.
On the [TP Status bar], click the speed button which is red-circled in the image above.
4
On the [Debug] menu, select [Start a Task] or [Step in] to execute the program.
5
Check the program flows, the robot posture and the run time in each window.
Setting Values Changed by COBOTTA Parameter Tool
Setting values such as the speed limit function and axis limit function, which are possible to change by COBOTTA parameter tool only, can be reflected in the simulation.
1
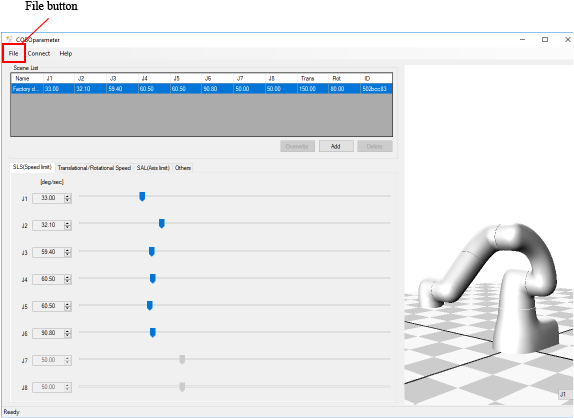
Open a project, which is created by WINCAPSIII, by using COBOTTA parameter tool.
Operation path: [File] - [Open Project]
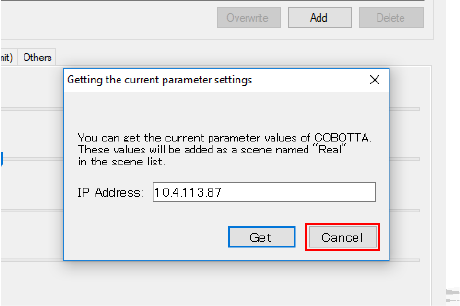
Opening a project will display the "Getting the current parameter settings" window. If you execute the simulation only, press [Cancel].
2
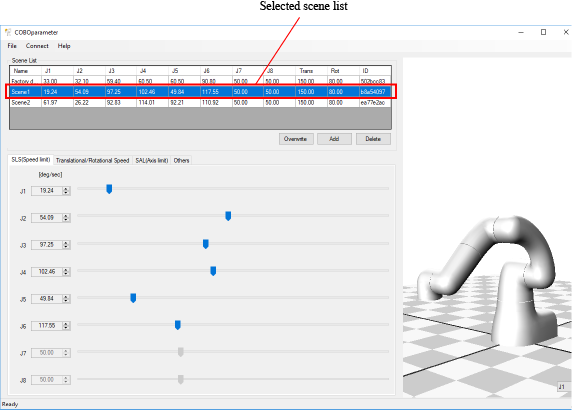
If only "Factory default" is displayed or you want to add a new scene in the scene list, press [Add] to add a new scene. After changing the setting values of added scene, press [Overwrite].
If you want to change a scene that you already created, select the scene and change the setting and then press [Overwrite].
3
Save the project changed by COBOTTA parameter tool.
Operation path: [File] - [Save Project]
Saving the project will reflect the value of selected scene list in the project created by WINCAPSIII.
4
Open saved project by WINCAPSIII. When checking the behavior in the simulation mode, it moves in the status that the value changed by COBOTTA parameter tool is reflected.
However, even if you send a project data from WINCAPSIII to the actual COBOTTA machine, value (safety parameter) changed by COBOTTA parameter tool will not be reflected in the actual COBOTTA machine. If you reflect the safety parameter in the actual COBOTTA machine, send the safety parameter from COBOTTA parameter tool to the actual COBOTTA machine.
ID : 2667