
ID : 7004
Optimal Speed Control Function
This function automatically adjusts the robot speed and acceleration during operation to their optimal states.
This function can be enabled/disabled.
If this function is not enabled, the likelihood of an error to occur will increase depending on the robot motion (this function is enabled by default).
Enable/disable can be set independently for each robot motion type (PTP motion/CP motion).
To set enable/disable, select from the 4 modes provided.
The description and features of each mode and setting will be provided in the following items.
- Optimal Speed Control Function Mode List
- Features of Each Enable/Disable Settings for PTP Motion
- Features of Each Enable/Disable Settings for CP Motion
- Mode Selection Procedure
Refer to the above items to set the mode for the optimal speed control function.
Optimal Speed Control Function Mode List
The following 4 modes are provided for the optimal speed control function.
| Mode | Optimal speed control function enable/disable | |
|---|---|---|
| During PTP motion | During CP motion | |
| 3 | Enable | Enable |
| 2 | Disable | |
| 1 | Enable | Disable |
| 0 | Disable | |
Default setting is mode 3.
Features of Each Enable/Disable Settings for PTP Motion
When Enabled
Even if the optimal speed control function is enabled, an error may occur during robot motion. Measures to take when an error related to the optimal speed control function occurs are provided below.
An overload error may occur in motion. In this case, adjust the motor load by setting appropriate values of the timer, internal speed, and acceleration. Note that the state of motor load can be checked with Remote TP/Virtual TP. Refer to "Displaying Servo State". An excess deviation error may occur in motion. In this case, adjust the speed and acceleration. - Operation time for PTP motion may be longer compared to when the function is disabled.
When Disabled
- The likelihood of an error to occur during PTP motion is higher than when the function is enabled.
Features of Each Enable/Disable Settings for CP Motion
When Enabled
Even if the optimal speed control function is enabled, an error may occur during robot motion. Measures to take when an error related to the optimal speed control function occurs are provided below.
An overload error may occur in motion. In this case, adjust the motor load by setting appropriate values of the timer, internal speed, and acceleration. Note that the state of motor load can be checked with Remote TP/Virtual TP. Refer to "Displaying Servo State". Errors of command acceleration limit over, excessive deviation, and command speed limit over may occur in motion. In this case, adjust the speed and acceleration with internal speed and acceleration. - A path shift of up to approximately 5 mm may occur in high-speed motion. Therefore, use the robot by reducing the speed if there is an obstacle near the motion.
- If the robot is stopped instantaneously during speed reduction near the vicinity of a singular point, the instantaneous stop time may extend. The instantaneous stop distance, however, remains unchanged.
- The robot motion speed may fluctuate even within the trapezoidal pattern constant speed section.
- Robot motion time for CP motion may be longer compared to when the function is disabled.
When Disabled
- The likelihood of an error to occur during CP motion is higher than when the function is enabled.
- The robot motion speed will be maintained at a constant speed within the trapezoidal pattern constant speed section.
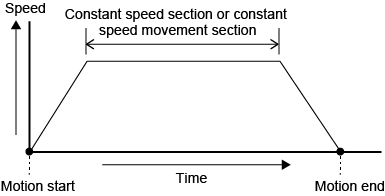
About Trapezoidal Pattern
A control method that follows a trapezoidal pattern is provided to control the robot speed. With this method, the robot speed is gradually increased after the robot motion starts and is maintained at a constant once it reaches a certain speed. After the motion ends, the speed is gradually decreased and halts at the end.
The section where the robot moves at constant speed is called the "constant speed section" or "constant speed movement section".
Mode Selection Procedure
If the default mode does not seem to work, try setting a different mode.
For example, in a case where PTP motion works properly, but a constant speed during the constant speed section for CP motion is preferred, enable/disable settings that should be selected for each motion type is as follows:
| PTP motion | Enable |
|---|---|
| CP motion | Disable |
Select the mode that satisfies the above conditions from the mode list. This should be mode 1 for this specific case.
ID : 7004
- Related Information
- Using Conditions That Should Be Set
- Notes for Setting
- Setting the Load Conditions