
ID : 2504
Easy Setting (WINCAPSIII)
Robot can exert its highest performance with the settings optimized for the operation environment. With this Easy Setting, users can easily complete the robot settings suitable for the actual operation environment. (Ver.2.0.*or higher)
- This function is available for VS-A3, VS-A4, VS-S2, HSR and HSA1 robots.
- For details about operation procedure in Teach pendant, refer to Easy Setting (Teach pendant).
Items
- Floor-mount or Overhead-mount (*1)
- Mass of payload [g]
- Payload center of gravity X [mm]
- Payload center of gravity Y [mm]
- Payload center of gravity Z [mm]
- Payload moment of inertia Ix [kgcm^2]
- Payload moment of inertia Iy [kgcm^2]
- Payload moment of inertia Iz [kgcm^2]
- Control set of motion optimization
- HighPathAccuracy setting
- Efficiency of gravity effect (*1)
- DEFECTION mode setting (*1)
*1 : Available for VS series
Operation Procedure
The following example shows how to perform Easy Setting for a VS-A4 robot.
1
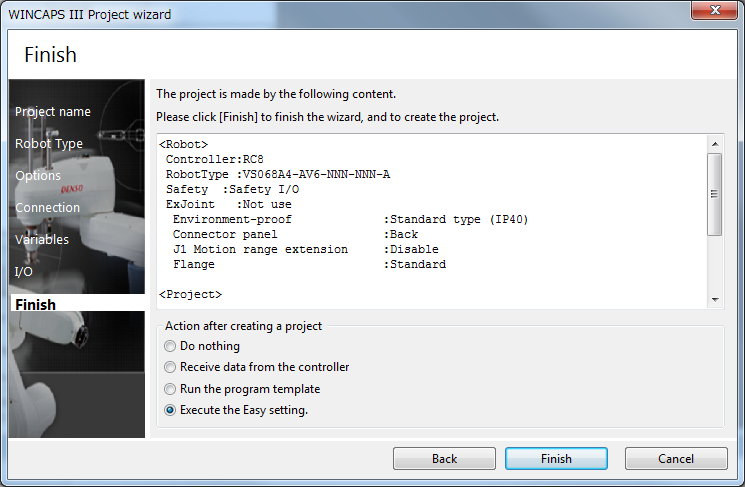
Create a new project.
In the [Action after creating a project] pane, select [Execue the Easy setting] and then click [Finish].
2
Easy Setting window appears.
This window shows items to be set and the current values. Press [Next] after the check.
To perform Easy Setting with a teach pendant, click [Cancel].
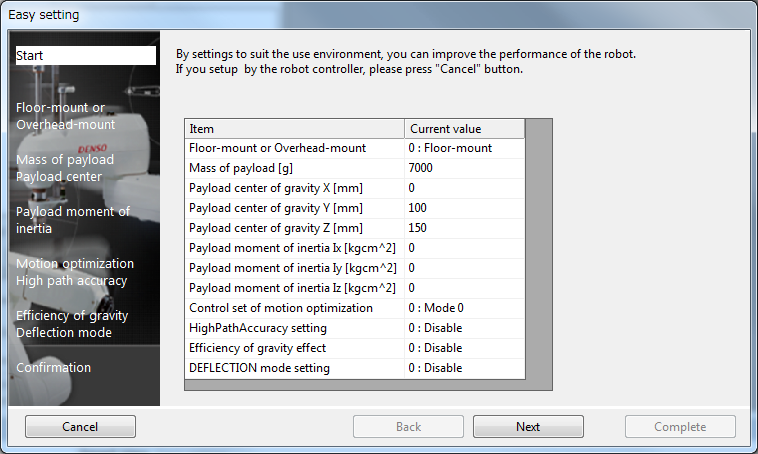
Pressing [Back] in each setting window will go back to the previous setting window.
3
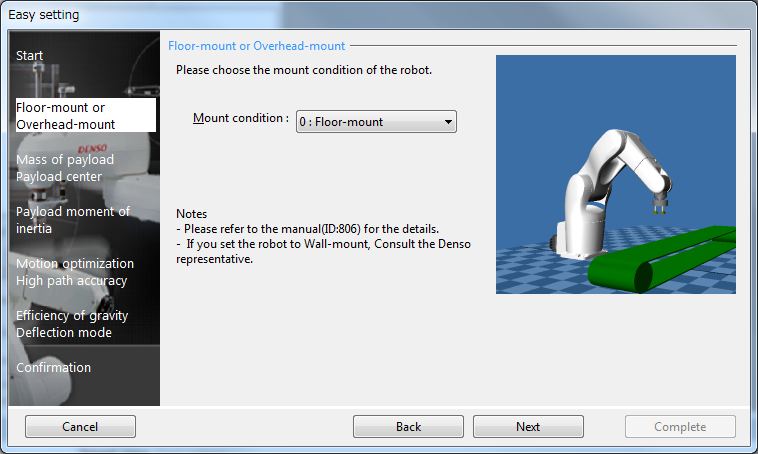
Specify the installation type (floor-mount or overhead-mount).
From the Mount condition, select [0: Floor-mount] or [1: Overhead-mount], and then click [OK].
For details, refer to Setting Robot Installation Conditions.
When you complete the setting, press [Next].
4
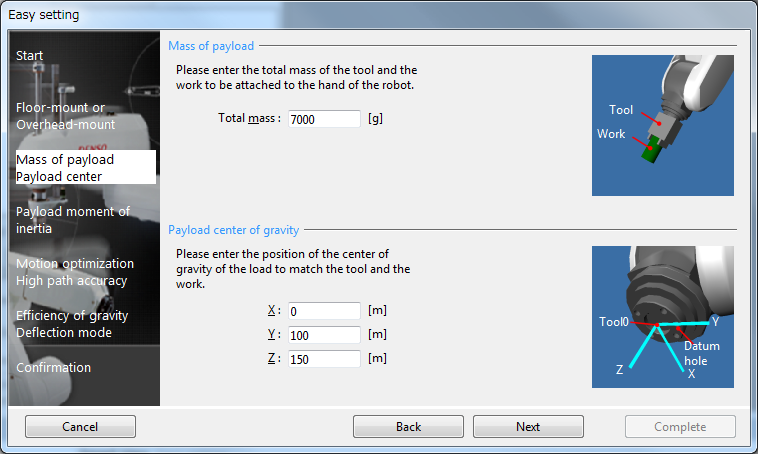
Specify [Mass of payload] and [Payload center of gravity].
-
Mass of payload
Enter a value in the textbox. (0 to 7000) -
Payload center of gravity
Enter a value in each text box. (-10000 to 1000)
When you complete the setting, press [Next].
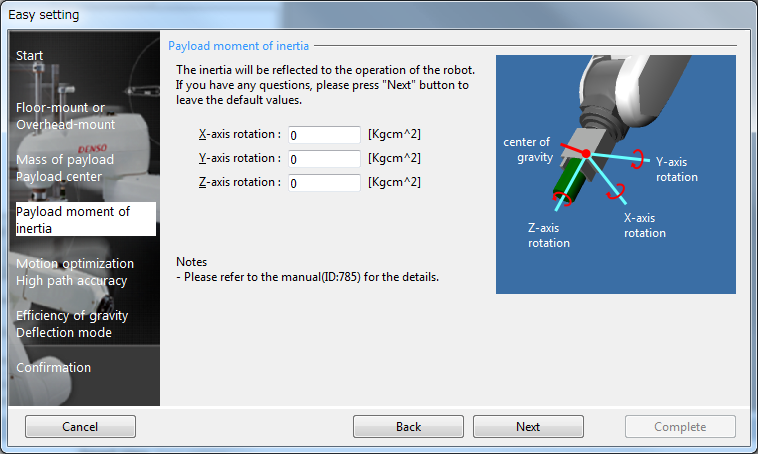
5
Specify [Payload moment of inertia].
Select a textbox, enter each value around X-, Y- and Z-axis rotation. (0 to 100000)
For details, refer to About Calculation of Edge Load Inertia.
When you complete the setting, press [Next].
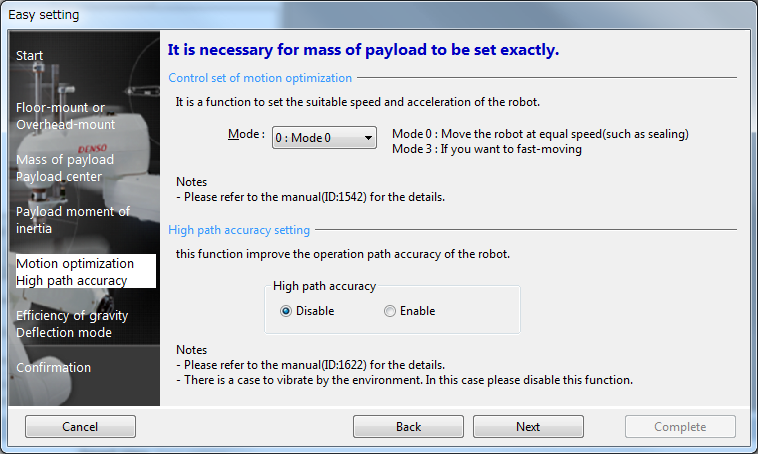
6
Specify [Control set of motion optimization] and [HighPathAccuracy setting].
-
Control set of motion optimization
From the Mode selection, select [0: Mode0] or [3: Mode3].
For details, refer to Optimal Speed Control Function. -
HighPathAccuracy
Enable/Disable the High precision control.
For details, refer to High Precision Control.
When you complete the setting, press [Next].
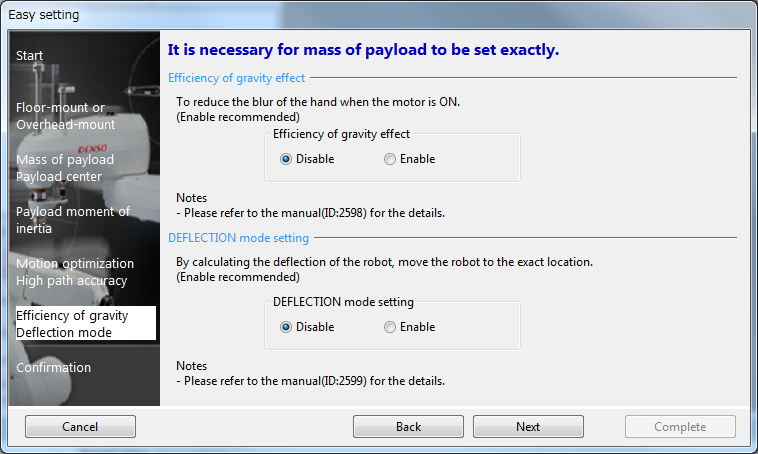
7
Specify [Efficiency of gravity effect] and [DEFECTION mode setting].
-
Efficiency of gravity effect
Enable/Disable the Gravity compensation function.
For details, refer to Gravity Compensation Function. -
DEFECTION mode setting
Enable/Disable the Deflection compensation function.
For details, refer to Deflection Compensation Function.
When you complete the setting, press [Next].
8
Revise the settings and then click [Complete] to save the setting values you have entered to the project.
This completes the settings.
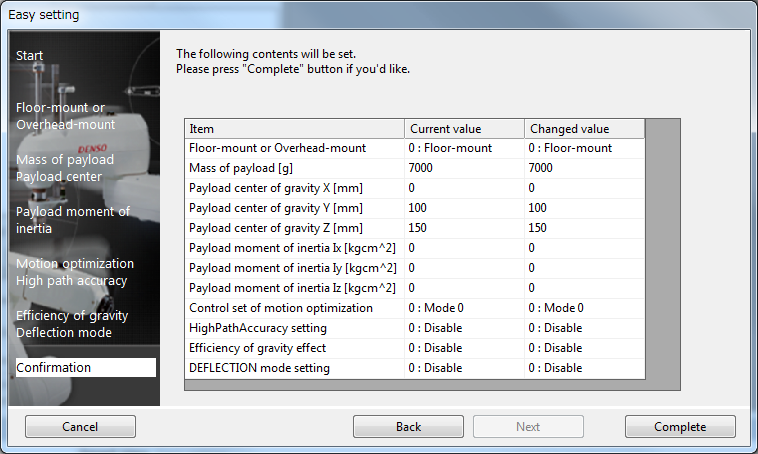
The data you have set is transferred to the controller at the project transfer.
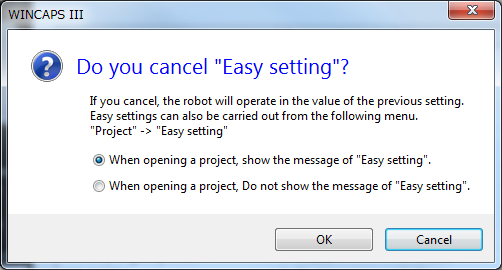
Cancel of Easy Setting
Pressing [Cancel] in each setting window will display the system message window that asks whether to cancel the Easy Setting. To cancel the Easy Setting, press [OK] in the window. Once it is cancelled, all the setting values you have made will not be saved.
In this system message window, you can select whether the Easy Setting dialog is displayed at the next startup.
Change of Settings
To change the settings you have done, from the Menu bar, click [Project], click [Easy setting].
ID : 2504