
ID : 2850
Arm Length Setting
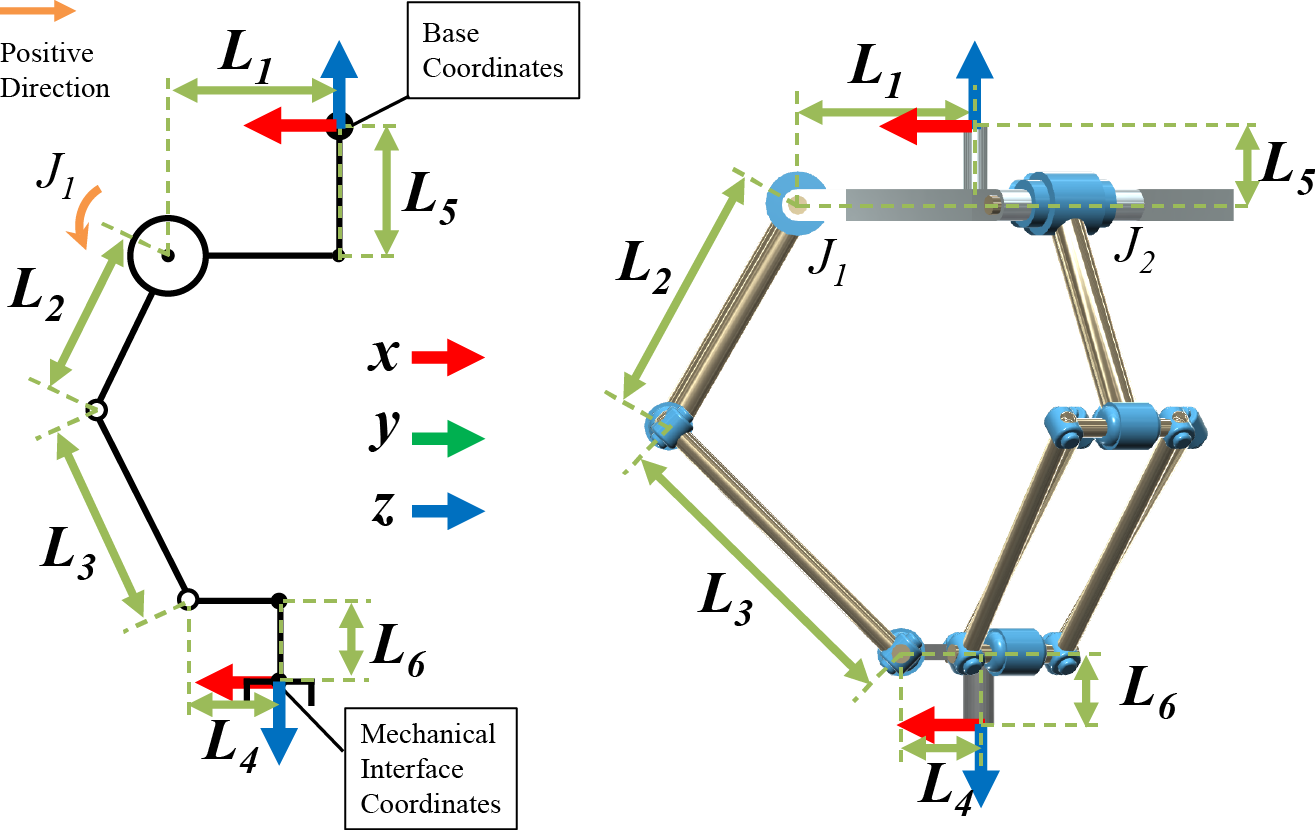
3 Axis Parallel Link Robot
Set the lengths from L1 to L6 shown by the figure. (Unit: mm)
| Arm No. | Description | Arm Length |
|---|---|---|
| L1 | Length: from base coordinate origin to center of robot arm joint | 0 mm or more |
| L2 | Length: from center of robot arm joint to portion of its elbow | 0 mm or more |
| L3 | Length: from portion of elbow to side of flange | 0 mm or more |
| L4 | Length: from side of flange to center of flange | 0 mm or more |
| L5 | Offset in Z axis direction: from base coordinate origin to the center of robot arm joint | 0 mm or more |
| L6 | Length in Z axis direction: from flange surface to its edge | 0 mm or more |
 |
||
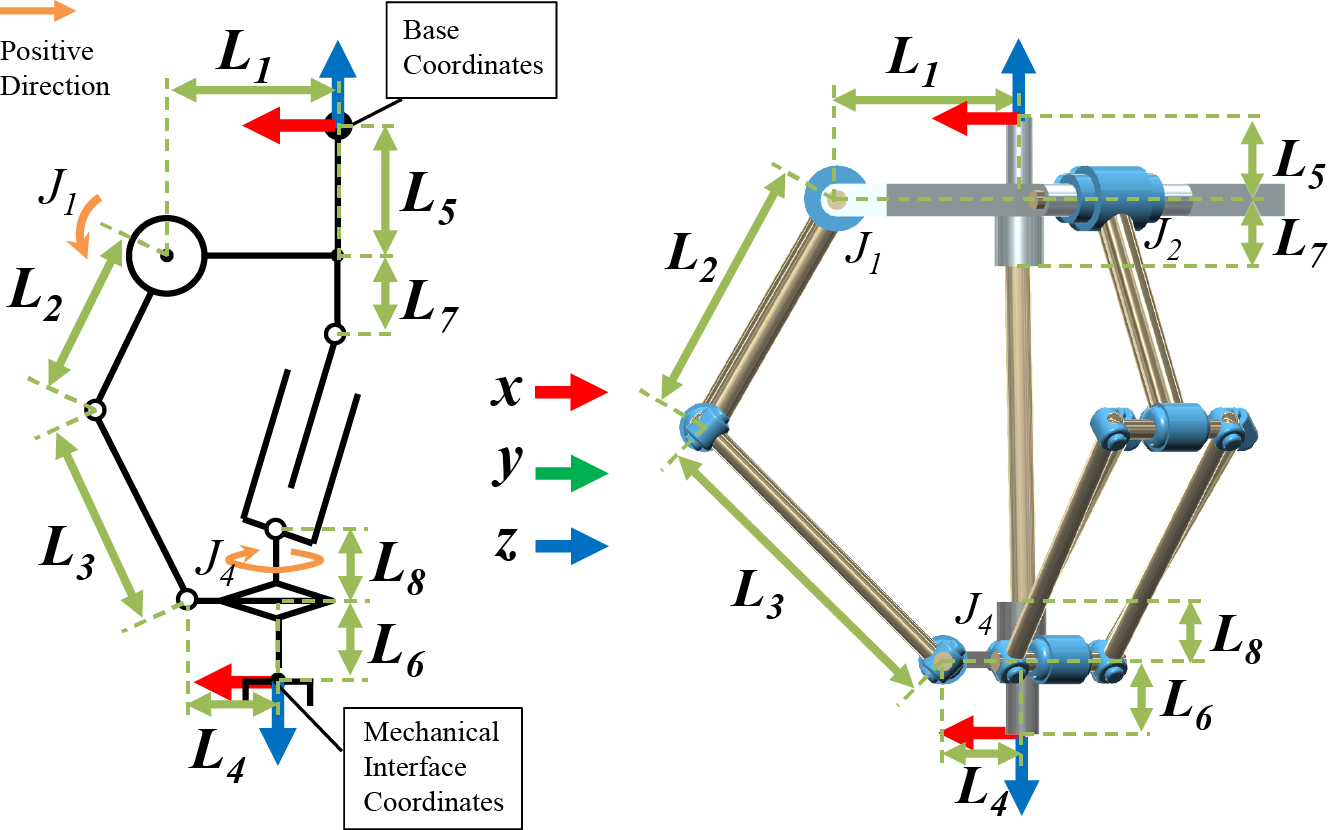
4 Axis Parallel Link Robot
Set the lengths of L7 and L8 adding to the dimension mentioned above for 3 Axis Parallel Link Robot (Unit: mm)
| Arm No. | Description | Arm Length |
|---|---|---|
| L7 | Length of the attachment part on the 4th-axis telescoping bar to be transmitted power (upper) | 0 mm or more |
| L8 | Length of the attachment part on the 4th-axis telescoping bar to be transmitted power (lower) | 0 mm or more |
 |
||
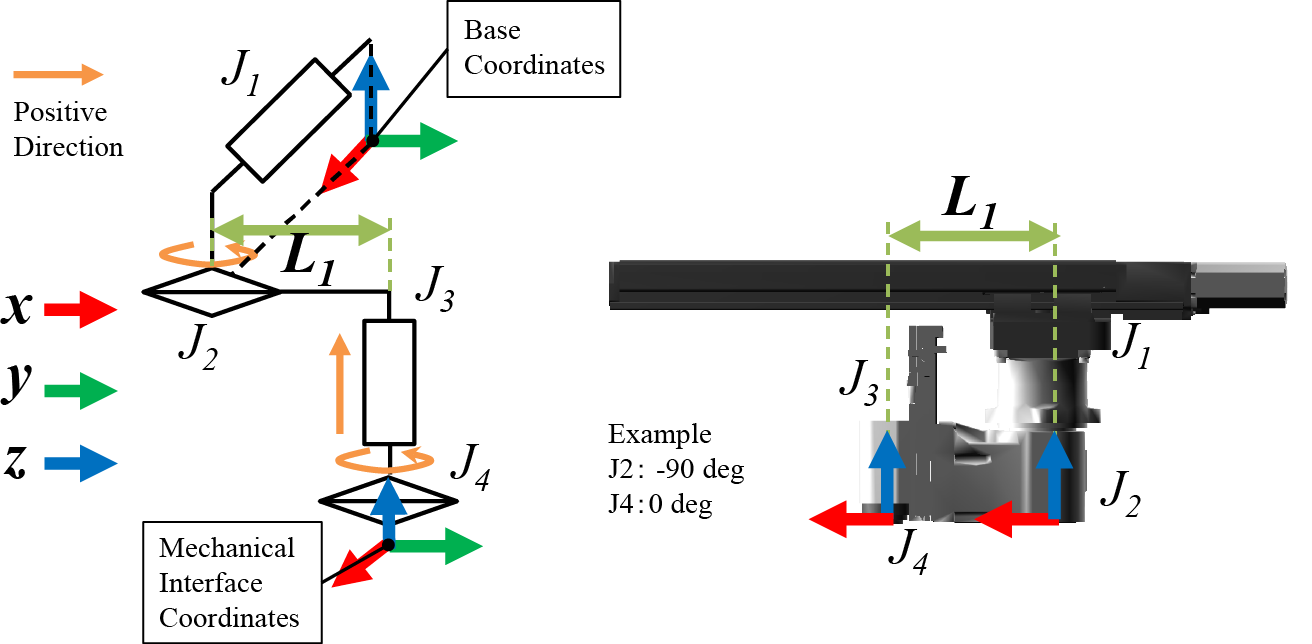
4 Axis XR Robot
Set the length of L1 shown by the figure. (Unit: mm)
| Arm No. | Description | Arm Length |
|---|---|---|
| L1 | Length: from the 2nd-axis rotation center to the 4th-axis rotation center | 0 mm or more |
 |
||
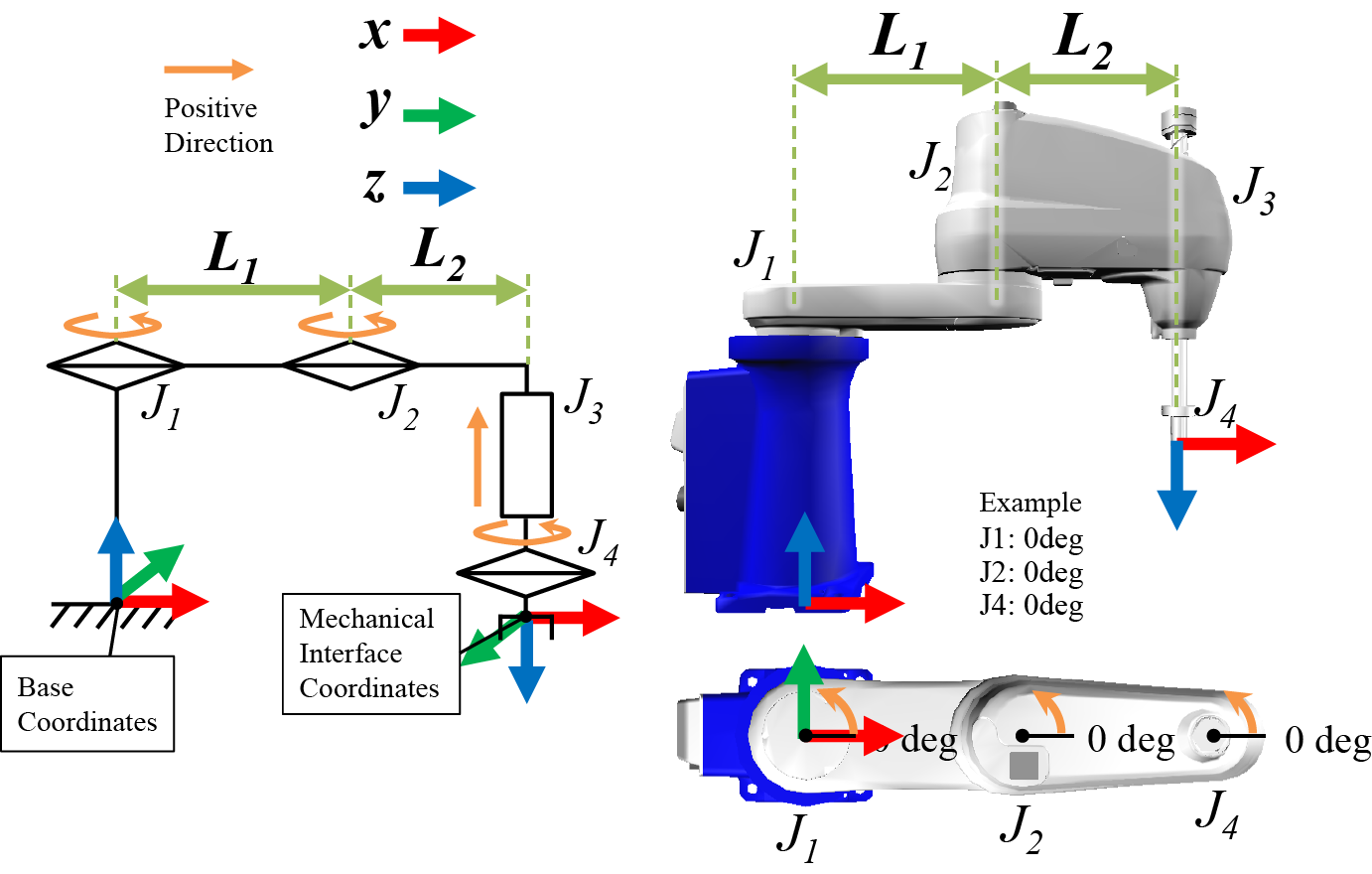
4 Axis Scalar Robot
Set the length of L1 and L2 shown by the figure. (Unit: mm)
| Arm No. | Description | Arm Length |
|---|---|---|
| L1 | Length: from the 1st-axis rotation center to the 2nd-axis rotation center | More than 0 mm |
| L2 | Length: from the 2nd-axis rotation center to the 4th-axis rotation center | More than 0mm |
 |
||
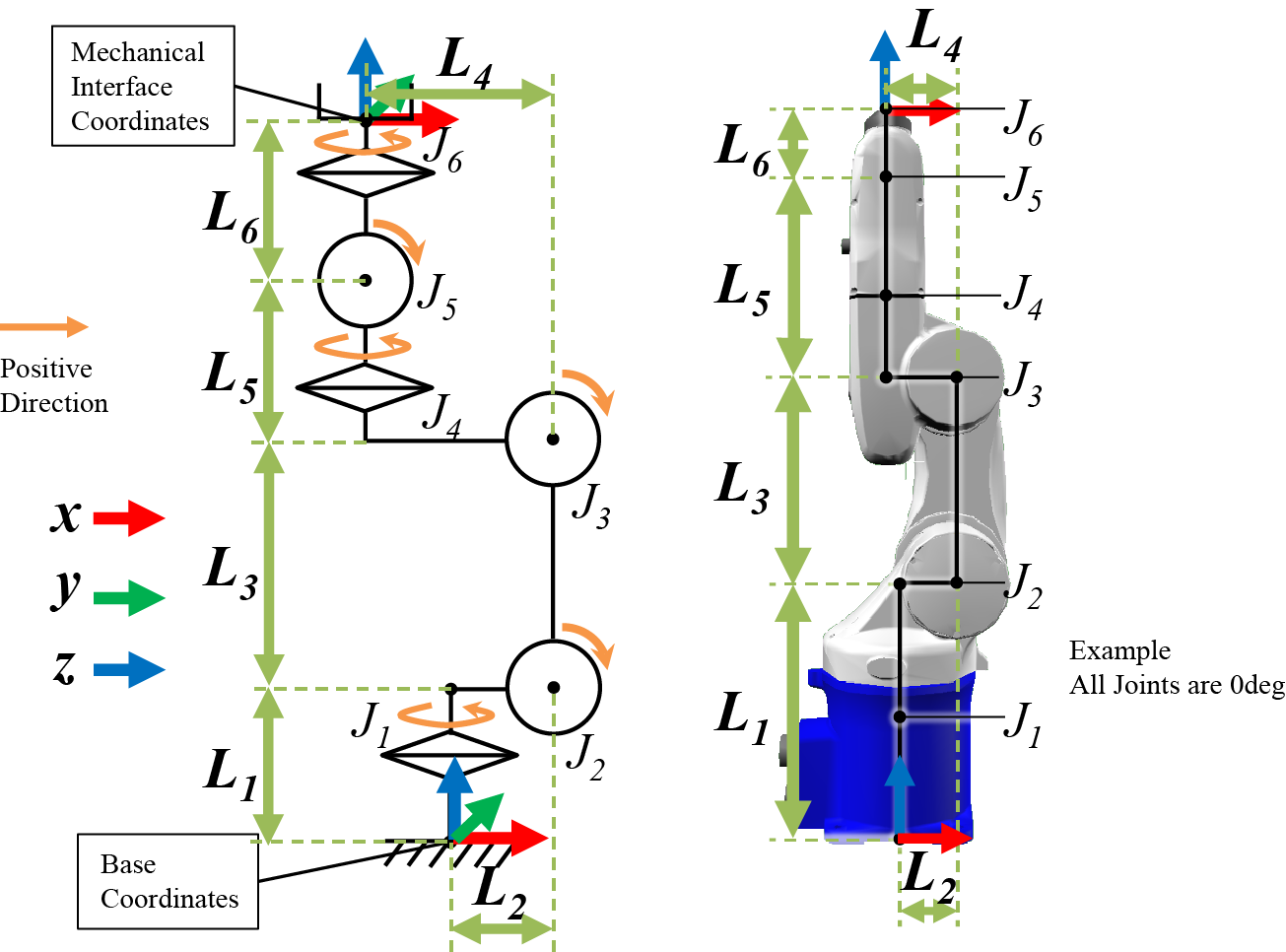
6 Axis TypeA Robot
Set the lengths from L1 to L6 shown by the figure. (Unit: mm)
| Arm No. | Description | Arm Length |
|---|---|---|
| L1 | Length in Z axis direction: from base coordinate origin to the 2nd-axis rotation center | 0 mm or more |
| L2 | Offset in X axis direction: from base coordinate origin to the 2nd-axis rotation center | 0 mm or more |
| L3 | Length in Z axis direction: from the 2nd-axis rotation center to the 3rd-axis rotation center | 0 mm or more |
| L4 | Offset in X axis direction: from the 3rd-axis rotation center to the 4th-axis rotation center | 0 mm or more |
| L5 | Length in Z axis direction: from the 3rd-axis rotation center to the 5th-axis rotation center | 0 mm or more |
| L6 | Length in Z axis direction: from the 5th-axis rotation center to the flange surface | 0 mm or more |
 |
||
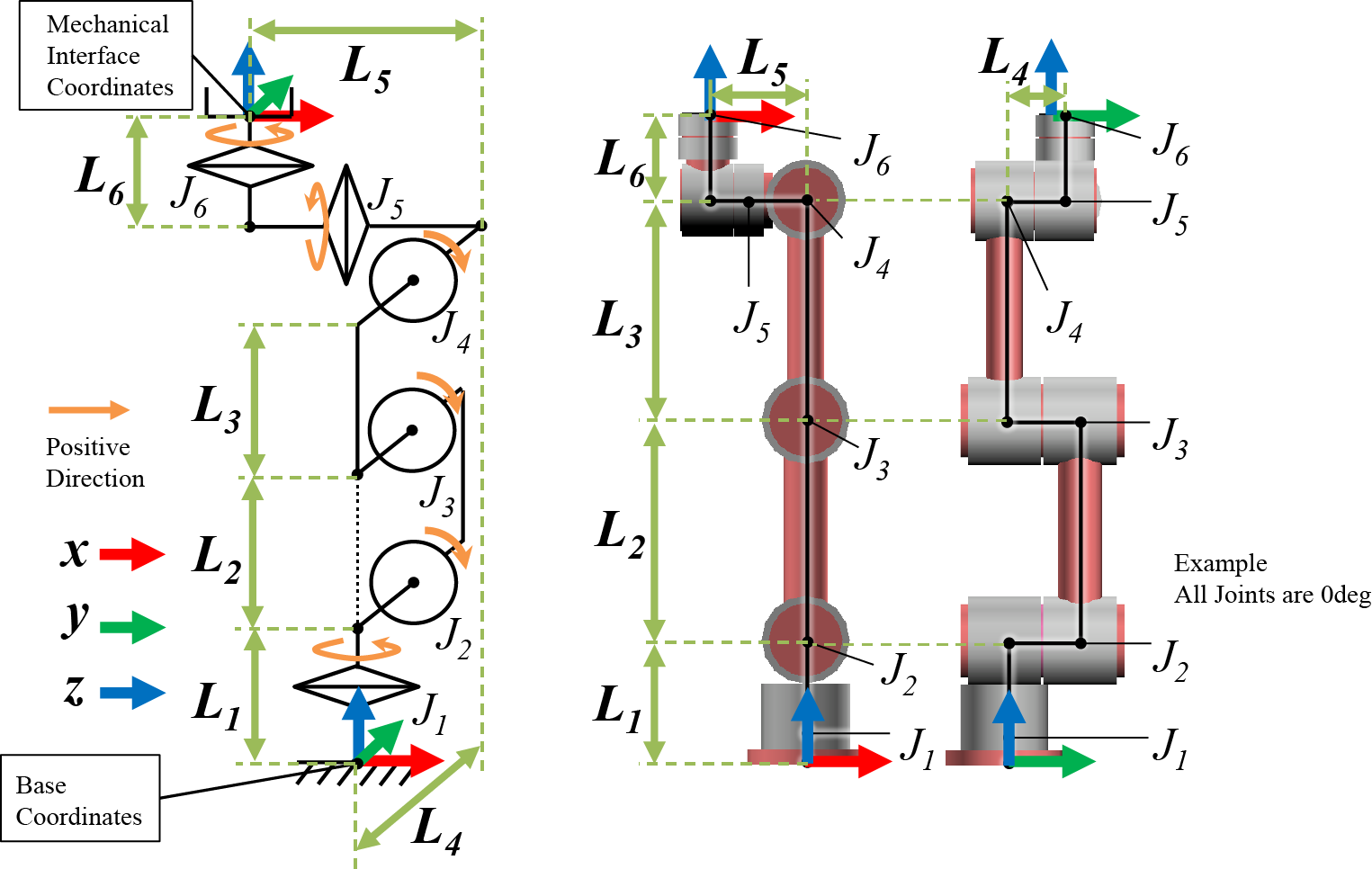
6 Axis TypeB Robot
Set the lengths from L1 to L6 shown by the figure. (Unit: mm)
| Arm No. | Description | Arm Length |
|---|---|---|
| L1 | Length in Z axis direction: from base coordinate origin to the 2nd-axis rotation center | 0 mm or more |
| L2 | Length in Z axis direction: from the 2nd-axis rotation center to the 3rd-axis rotation center | 0 mm or more |
| L3 | Length in Z axis direction: from the 3rd-axis rotation center to the 4th-axis rotation center | 0 mm or more |
| L4 | Offset in Y axis direction: from base coordinate origin to the 5th-axis rotation center | 0 mm or more |
| L5 | Offset in X axis direction: from base coordinate origin to the 6th-axis rotation center | 0 mm or more |
| L6 | Length in Z axis direction: from the 4th-axis rotation center to the 6th-axis rotation center | 0 mm or more |
 |
||
ID : 2850