
ID : 3145
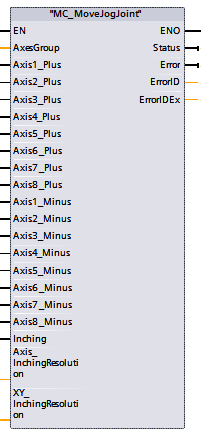
MC_MoveJogJoint
To operate a robot with Joint mode from TP panel.
| Graphic expression | FB No. | FB category |
|---|---|---|
 |
FB2013 | Motion |
Input parameter
| Parameter name | Data type | Valid range | Default | Omission (*) |
|---|---|---|---|---|
| AxesGroup | Integer | 1 or larger | 1 | No |
|
||||
| Axis1_Plus | Boolean |
|
False | Yes |
|
||||
| Axis2_Plus | Boolean |
|
False | Yes |
|
||||
| Axis3_Plus | Boolean |
|
False | Yes |
|
||||
| Axis4_Plus | Boolean |
|
False | Yes |
|
||||
| Axis5_Plus | Boolean |
|
False | Yes |
|
||||
| Axis6_Plus | Boolean |
|
False | Yes |
|
||||
| Axis7_Plus | Boolean |
|
False | Yes |
|
||||
| Axis8_Plus | Boolean |
|
False | Yes |
|
||||
| Axis1_Minus | Boolean |
|
False | Yes |
|
||||
| Axis2_Minus | Boolean |
|
False | Yes |
|
||||
| Axis3_Minus | Boolean |
|
False | Yes |
|
||||
| Axis4_Minus | Boolean |
|
False | Yes |
|
||||
| Axis5_Minus | Boolean |
|
False | Yes |
|
||||
| Axis6_Minus | Boolean |
|
False | Yes |
|
||||
| Axis7_Minus | Boolean |
|
False | Yes |
|
||||
| Axis8_Minus | Boolean |
|
False | Yes |
|
||||
| Inching | Boolean |
|
False | Yes |
|
||||
| Axis_InchingResolution | Real | 0.0001 to 0.1 | 0.0004 | Yes |
|
||||
| XY_InchingResolution | Real | 0.01 to 1 | 0.01 | Yes |
|
||||
(*) : For some parameters, entries can be omitted.
- Yes : Entry can be omitted.
- No : Entry required always.
Output parameter
| Parameter name | Data type / Description |
|---|---|
| Status | Boolean |
|
|
| Error | Boolean |
|
|
| ErrorID | Word |
|
|
| ErrorIDEx | DWord |
|
Function description
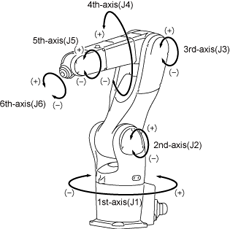
The following figure shows the robot motion in Joint mode.
| 6-axis robot | 4-axis robot |
|---|---|
 |
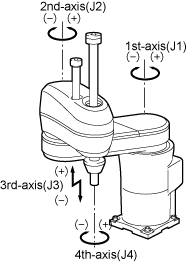 |
| Drives each of the six Joints independently. | Drives each of the four Joints independently. |
Attention
To execute this FB, FB with the FB category "Motion" needs to be made executable.
To make FB with the FB category "Motion" executable, use the FB "MC_Power".
ID : 3145