
ID : 3350
Selective Joint Assignment to Each Robot
Whether the target selective joint belongs to Robot0 or Robot1 is determined by the order of connection of EtherCAT Slave-supported amplifier.
EtherCAT Slave-supported amplifier which connects to the EtherCAT master board first is assigned to the 1st-joint of Robot0. [Joint Setting] window of WINCAPSIII shows how many joints are assigned to Robot0. The remaining joints are assigned to Robot1.
Suppose that you create the following system structure.
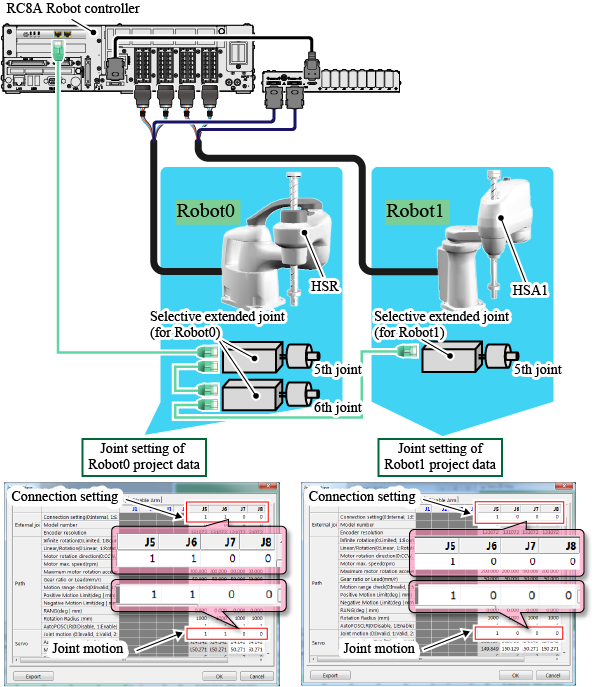
In this example, as you can see in the [Joint Setting] window of WINCAPSIII, the joint setting of Robot0 project data is configured so that the 5th- and 6th-joints are used as selective extended joints. Therefore, two joints from the nearest to the EtherCAT master board are assigned as selective joints of Robot0, and the remaining joints are assigned to Robot1.
The follwling figure shows a wrong example.
In the following example, users intend to use 8 selective extended joints as Robot0 joints.
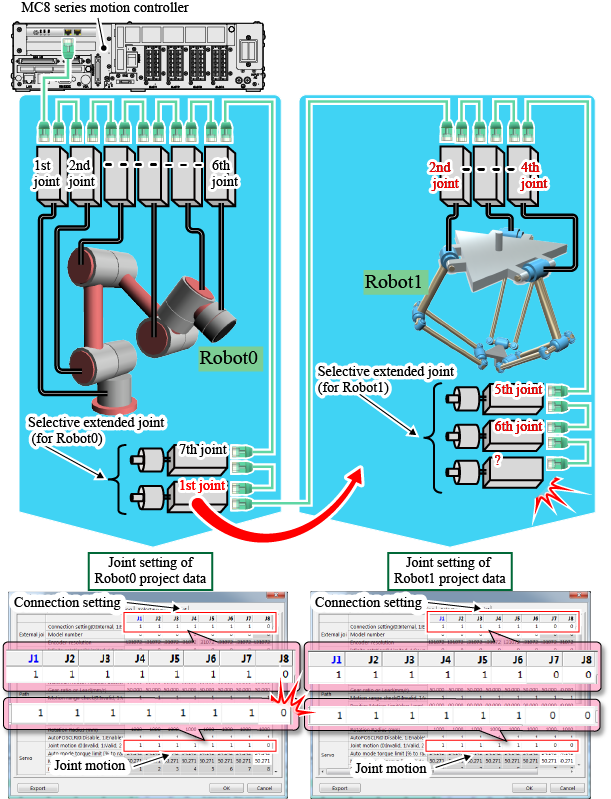
However, in the joint setting of Robot0 project data, users assigned only 7 joints to Robot0 joints by mistake. As a result, an axis that users intended to use as the 8th joint of Robot0 was assigned to the 1st joint of Robot1. The system ends up to be a different system from the user's expectation.
Also, in the joint setting of Robot1 project data, if users assigned only 6 joints to Robot1, the number of joints in the project data and the number of joint actually connected are inconsistent, resulting in an error. (In the above illustration, Robot1 has four selective extended joints and three robot joints. 7 joints in total.)
For information about joint setting, refer to "Parameter Setting" in the "SELECTIVE EXTENDED JOINT (ETHERCAT) MANUAL".
ID : 3350