
ID : 6993
Mechanical Interface Coordinates
This section describes the mechanical interface coordinates in the following subsections.
- Concept of the Mechanical Interface Coordinates
- Mechanical Interface Coordinates When Using the Electric Gripper for COBOTTA
Concept of the Mechanical Interface Coordinates
The mechanical interface coordinates refers to 3-dimensional Cartesian coordinates whose origin is at the center of the flange surface as shown as show below.
The X,Y and Z axis in mechanical coordinates are expressed as Xm, Ym, and Zm.
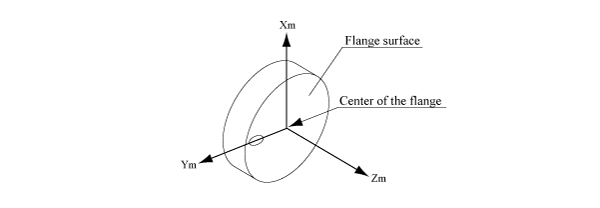
Zm: Normal axis on the center of the flange surface
Ym: Axis passing through the flange center and the center of φ5H7.
Xm: Axis passing through the flange center and crossing Zm and Ym at right angles
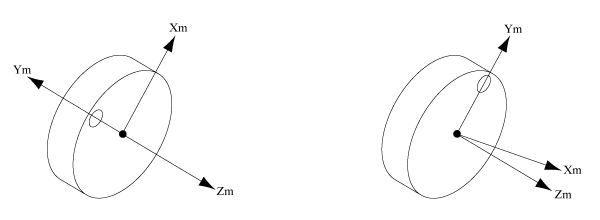
Unlike the work coordinates or base coordinates, the mechanical interface coordinates rotate as the robot flange rotates.
Mechanical Interface Coordinates When Using the Electric Gripper for COBOTTA
If the electric gripper for COBOTTA is installed, the origin of the mechanical interface coordinate is the center of two fingers on a plane surface where two finger’s end exist.

ID : 6993