
ID : 7329
Displaying and Setting the Collision detection setting
Operation path : [F2 Arm] - [F6 Aux] - [F2 Collision/Interference] - [F1 Collision Detection]
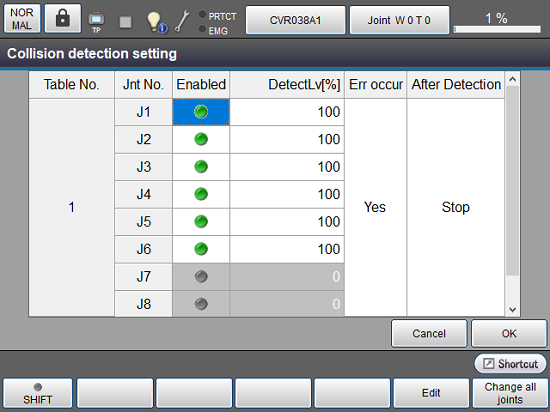
This window allows you to enable/disable the collision detection function, set the detection level for each axis. It also sets the occurrence/non-occurrence of error when a collision is detected.
Pressing [F1 Collision Detection] will display the following [Collision detection setting] window.
For details of operation, refer to the "Procedure to Set" of Function Guide.
| Available function keys | ||
|---|---|---|
| [F5 Edit] | Selecting an item first, and pressing this button allows you to change the setting. Entered value is confirmed by pressing [OK] on the [Collision detection setting] window. |
|
| Enable | Enables/disables the collision detection function for each axis. Pressing [Edit] will display a message to confirm the change. Pressing [OK] will confirm the setting.For details, refer to "Enable/Disable Setting" of Collision detection setting of Function Guide. |
|
DetectLv[%] |
Sets the detection level for each axis. Pressing [Edit] will display a numeric keypad. Enter a value with the numeric keypad, and press [OK] on the numeric keypad. For details, refer to "Setting of Detection Level" of Collision detection setting of Function Guide. |
|
Err occur |
Specifies whether to issue an error when a collision is detected. Pressing [Edit] will display a dialog window for setting change. Selecting "Yes" or "No" first, and pressing [OK] will confirm the change. For details, refer to "Setting of Occurrence of Errors During Collision Detection" of Collision detection setting of Function Guide. |
|
|
After Detection |
Specifies whether to stop the robot on the motion path or stop the robot after it is set to the axis free status after a collision is detected. Pressing [Edit] will display a dialog window for setting change. Selecting "Stop" or "Free" first, and pressing [OK] will confirm the change. For details, refer to "Setting of Axis Free at Collision Detection" of Collision detection setting of Function Guide. |
|
| [F6 Change all joints] | When the system message is displayed, select [ON] or [OFF] in the [Col Detect] and press [OK]. [ON]: Function is enabled for all axes. |
|
ID : 7329