
ID : 7304
Enable/Disable Setting
Use the Remote TP/Virtual TP to enable/disable the collision detection function for each axis. The initial value is set to "Enable."
Setting Procedure
The setting procedure using Remote TP/Virtual TP operation is indicated.
The collision detection function is enabled/disabled in the [Collision detection setting] window.
1
Operation path: Top window - [F2 Arm] - [F6 Aux] - [F2 Collision/Interference] - [F1 Collision Detection]
Press [F1 Collision Detection] in the [Collision/Interference] window.
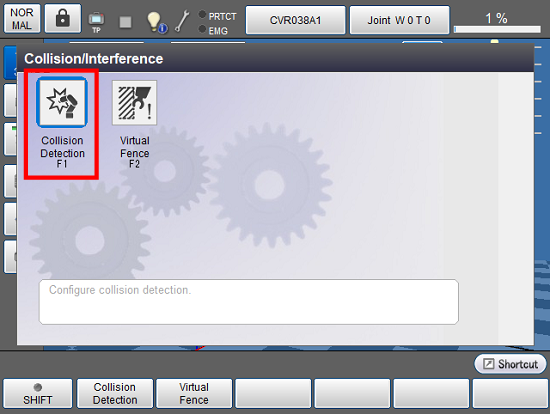
2
Select the axis numbers for which to enable the collision detection function and press [Enable] or [F5 Edit] for each axis number.
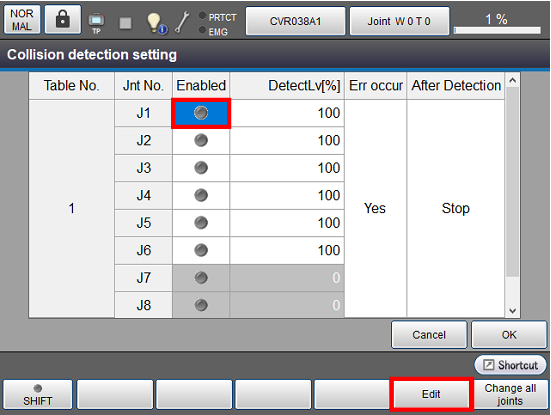
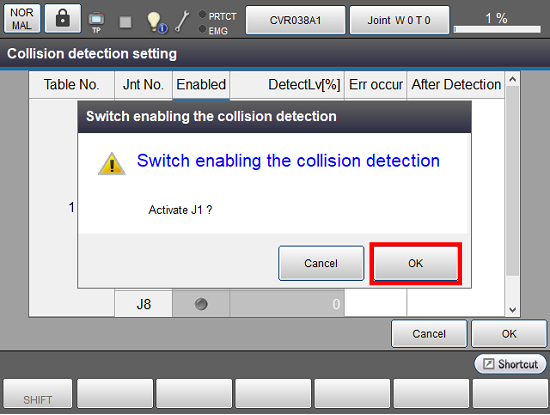
A system message is displayed. Press [OK] to confirm it.
Press [Cancel] to stop changing the settings.
If J1 is enabled, a green mark is displayed as follows.
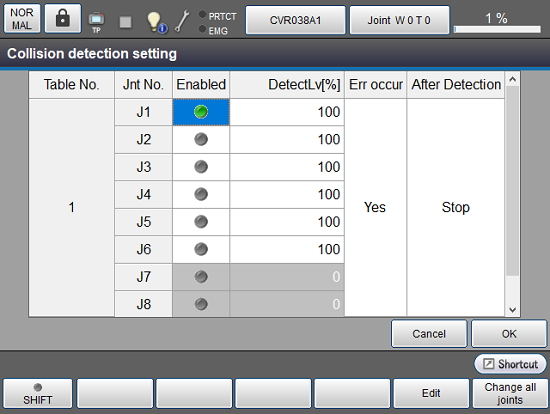
3
Enable axes requiring setting according to STEP 2.
To change the setting of all axes, press [F6 Change all joints].
When the system message is displayed, select [ON] to enable the collision detection for all axes or select [OFF] to disable the detectionfunction, and then press [OK].
| Enable for all axes | Disable for all axes |
|---|---|
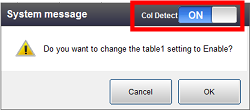 |
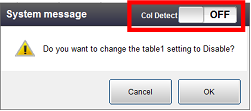 |
4
When you have completed setting all the axes, press [OK].
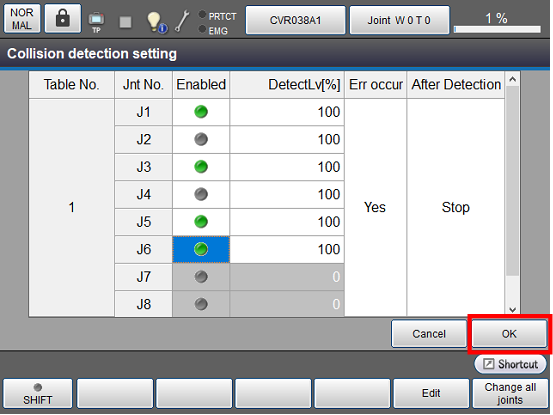
The setting is saved, and the collision detection function is enabled for the specified axis.
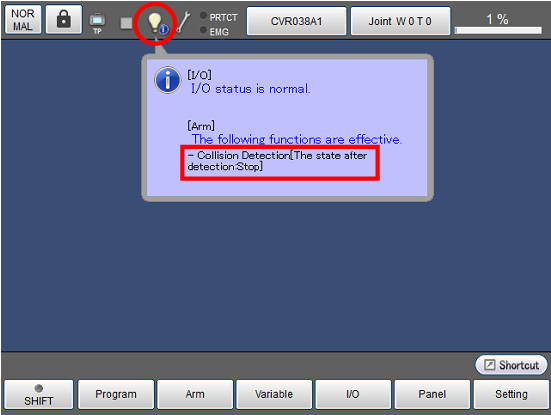
The enable state of collision detection function can be checked by pressing the light bulb icon of Remote TP/Virtual TP.
ID : 7304