
ID : 290
DevH
Function
To return a deviation calculation result with the the reference position coordinate system of position type data.
Syntax
DevH(reference position, deviation)
Guaranteed Entry
- Reference position
- Designate by position type data.
- Deviation
- Designate by position type data.
Return Value
Return a deviation calculation result by position type data.
Description
The return values will be the values where deviations from the reference position coordinate system are added to each element of the reference position.
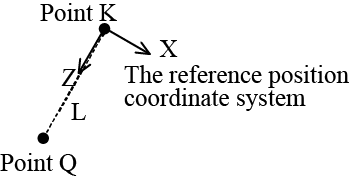
The reference position coordinate system mentioned here is the coordinate system that meets both of the following conditions:
- a coordinate system whose origin is determined by the position components (X, Y, and Z) of the position type data specified as a reference position, and
- a coordinate system whose slope is determined by the posture components (Rx, Ry, and Rz) of the position type data specified as a reference position.
However, for the T-axis on the 4-axis robot, the Rz that is specified by the argument "Deviation" with position type data is added to the current position's Rz value, regardless of the reference position coordinate system.
FIG element of reference position is assigned as FIG element of the return value.
Level 1 error occurs if the return value is out of the motion range. Refer to "Error Processing Routine."
Point P as reference point, then,
Point Q2 = DevH(point P, P(0,0,L,0,0,0))Related Terms
Attention
-
Example
'!TITLE "DENSO Robot Program"
Sub Sample_DevH
Dim aaa As Position
Dim bbb As Position
' Assign the coordinate position with X and Y at 200 and Z at -300, respectively, to aaa
aaa = P( 200, 200, -300, 0, 0, 0, -1 )
bbb = DevH( aaa, P( 100, 100, 100, 90, 90, 90, -1 ) )
' Display calculation result on the message output window
PrintDbg bbb
End SubID : 290