
ID : 5355
TrackInRange
Function
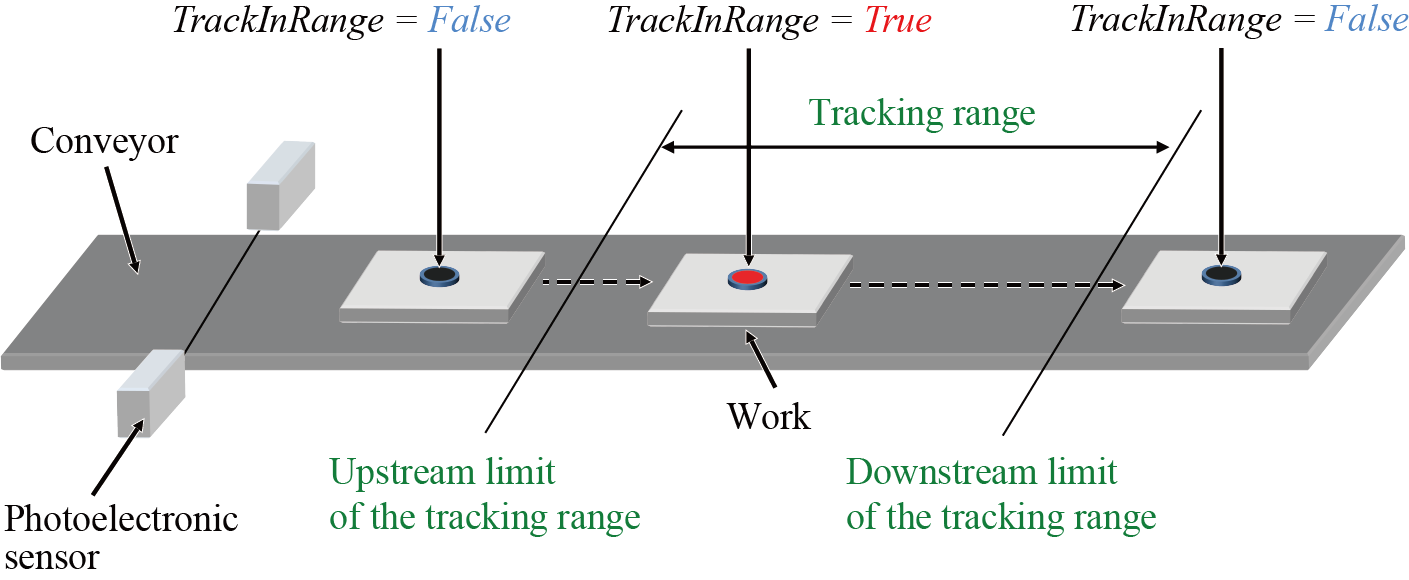
Check whether the current position of the tracking-target work is within the tracking range.
Syntax
TrackInRange (Conveyor number[, Offset value[, Downstream limit check]])
Guaranteed Entry
- Conveyor number
-
Specify the conveyor number (1-16) to be used by integer type data.
(If your robot controller is Ver.1.11.* or lower, available conveyor number is 1 or 2.) - Offset value
-
Specify the offset distance by double-precision real number.
Conveyor tracking is expressed in units of [mm]; circular tracking (Ver.2.3.* or higher) is expressed in units of [deg].
Specifying positive values will offset in the conveyor vector direction, and specifying negative values will offset in the opposite of the conveyor vector direction.
Offset value is the distance from the datum point on the workpiece that have been determined at the conveyor calibration.
This value determines a point on the workpiece that is used to determine whether the workpiece exists within the tracking range.
If the offset value is "0", the workpiece is judged as "within the tracking range" when the said datum point is located in the tracking range.
This is omittable. This should be "0" if it is omitted. This entry is available in Ver.1.10.* or higher. - Downstream limit check
-
Set the downstream limit check on the tracking range.
If this option is enabled, the workpieces that exist between the upstream and the downstream limits of the tracking range are tracked. To enable this option, specify VARIANT_TRUE(-1).
If this option is disabled, all workpieces that exist on the downstream from the upstream limit of the tracking range are tracked. To disable this option, specify VARIANT_FALSE(0).
This is omittable. This should be VARIANT_FALSE(0) if it is omitted.
If this option is disabled, note that it is impossible to distinguish whether a workpiece exists between upstream and downstream limits or exists in the downstream of the downstream limit. This entry is available in Ver.1.12.1 or higher.
Return Value
An integer type data is returned.
If the position specified by the offset value is within the tracking range, a value other than "0" (True) is returned. If the position is out of the tracking range, "0" (false) is returned.
Description
Check if the tracking target work specified by TrackTargetPos is within the tracking range.
Combining this command with "Wait" command will suspend a task until a tracking-target work piece enters the tracking range.
Related Terms
TrackStartArea, TrackOffsetMargin, TrackTargetPos, TrackStandByPos, TrackCurPos, TrackCount, TrackArrivalTime, Commands for Conveyor Tracking、Commands for Circular Tracking
Attention
This command is dedicated for conveyor and circular tracking.
Example
Wait until the current position of the tracking target work enters the tracking range.
Wait TrackInRange(1)Wait until the position of 500 mm upstream from the current position of tracking-target work enters the tracking range.
Wait TrackInRange(1, -500)ID : 5355