
ID : 2974
Path Deviation Prevention
If a robot pass deviates from the specified path when operating the free curve interpolation (Move S), an arrangement of path points setting can prevent from that deviation.
The following shows a countermeasure of the path deviation, when setting those path points.
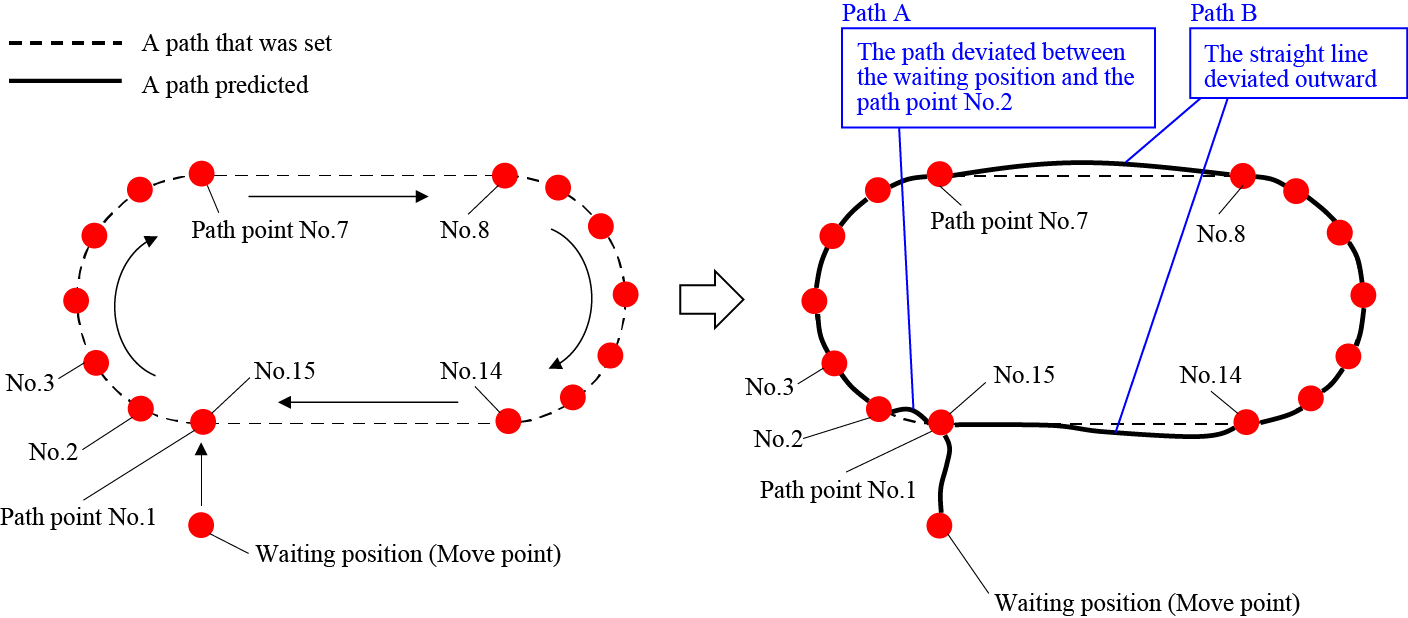
Path A
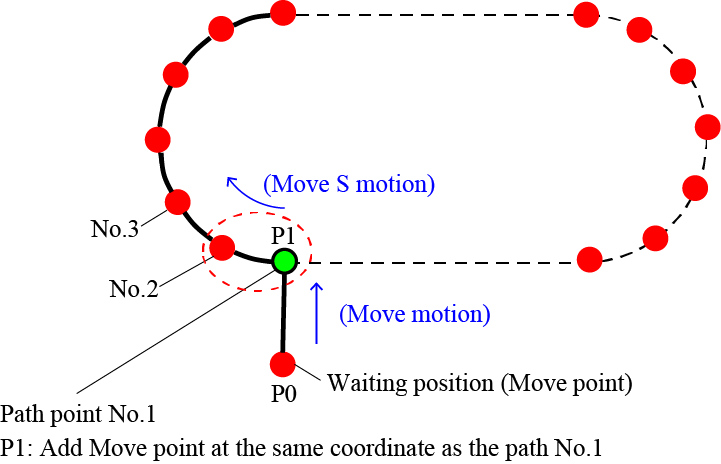
To start free curve interpolation (Move S) at the path point No.1 is able to prevent from the deviation towards the path A.
- Set Move point at the same coordinate as the path No.1 and make the robot arm move from the waiting position to the path point No.1.
- Make the robot arm move by free curve interpolation from the path No.1.
Sample Program
GetPathPoint command substitutes the coordinate of the path point No.1 in P variable (P1), the robot arm performs free curve interpolation (Move S) after moving to P variable. To use GetPathPoint command does not need teaching. Modifying the path point can be reflected.
TakeArm
P1 = GetPathPoint( 2, 1 ) ‘Substitute the coordinate of the path point No.1
‘on the path No. 2 in P1
Move L, P0 ‘waiting position
Move L, P1 ‘Move towards Move point at the same coordinate as the path point No.1
HighPathAccuracy True ‘High Precision Mode on
Move S, 2 ‘Free Curve Interpolation motion of the path No. 2
HighPathAccuracy False ‘High Precision Mode off
Path B
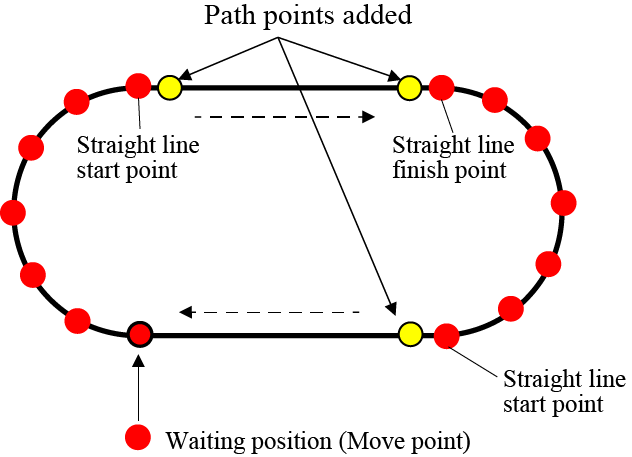
Adding path points on the straight line, where just after the motion starts or where just before the motion finishes, can prevent from the deviation from the path B.
If adding path points, be sure the following matters:
- The path points to be added should be 1 to 2 mm away from the points of start/finish. The point that is close less than 0.5 mm has no effect.
If the motion speed is fast, these short-distance path points could be seen as the same point; and that straight-line could widen as a result. In that case, place the adding path points away. - Be sure not to change the wrist figure between the points of start/finish/adding path.
-
Be sure to add a path-point where just after the motion starts, even if that straight line is the final path.
ID : 2974