
ID : 426
CPMode
Function
Change CP interpolation mode setting.
Syntax
CPMode setting value
Guaranteed entry
- Setting value
-
Designate a setting value by integer type data.
0: "Rotate"
1: "Constant" (Default)
2: "Constant(Compatible)"
Description
Change CP interpolation mode setting.
CP Interpolation Mode
CP interpolation mode refers to types of methods to adjust robot operation time in CP motion.
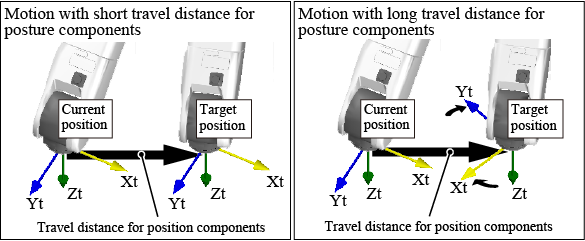
Robot motion components are largely divided into two categories: posture components and position components.
When operating a robot, a robot controller calculates operation time required to move it from the current position to the target position for posture components and position components respectively. You can adjust actual operation time in several ways based on those operation times. CP interpolation mode is divided into the following types depending on the way you adjust it.
- Setting value: 0 "Rotate"
- Longer one of them, operation time of posture components and that of position components, will be actual operation time.
- Setting value: 1 "Constant" (Default)
-
The position component operation time will be actual operation time. However, travel distance for posture components can be too long that the operation time of posture components cannot be aligned with that of position components even if the speed of posture components is increased to the upper limit. In this case, actual operation time will be the posture component operation time with the posture component motion speed increased to the upper limit.
The upper limit for the posture component motion speed is proportional to the speed setting (external speed * internal speed). Therefore, even the same motion can result in the following cases.
- With a lower speed setting, the posture component operation time can be aligned with the position component operation time.
- With a higher speed setting, the posture component operation time cannot be aligned with the position component operation time.
Therefore, a lower speed setting can result in shorter actual operation time.
- Setting value: 2 "Constant(Compatible)"
- This is basically the same as Setting value: 1, but if the posture component operation time cannot be aligned with the position component operation time, actual operation time is equal to or shorter than that in Setting value: 1.
Change the CP Interpolation Mode Setting
You can change the CP interpolation mode setting in two ways: by CPMode command and by changing a parameter.
When you adjust it by CPMode command, restarting the robot controller returns the CP interpolation mode setting to the original state.
"Setting of TCP speed pattern", one of user parameters, is a parameter to adjust CP interpolation mode. When you adjust it by changing the parameter, restarting the robot controller does not return the CP interpolation mode setting to the original state.
Related Terms
Attention
- Acquisition of axis control of the robot is required.
- Adjusting CP interpolation mode can change the robot motion speed.
Example
'!TITLE "Setting of CP Interpolation Mode"
' Set CP interpolation mode to 0
Sub Sample_CpMode
TakeArm Keep = 1
' Set CP interpolation mode to 0
CpMode 0
End SubID : 426