
ID : 441
Move C
Function
To move the robot to the designated coordinates along with an arc.
Syntax
Move C, route position, target position[, motion option]
Guaranteed Entry
- Route position
- Designate a route position by position type data, homogeneous translation type data and joint type data.
- Target position
- Designate a target position by position type data, homogeneous translation type data and joint type data. Target position option can be added to the target position.
- Motion option
- Designate a motion option.
Description
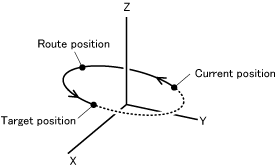
The robot moves to a route position and then a target position along an arc drawn over 3 points: current position, route position and target position.
Attention
The posture transforms from the current position posture to the target position posture. Posture element in the route position is ignored. If the figures of the current position and target position are not identical, an error may occur.
Example
'!TITLE "Movement to Designated Coordinates"
'Movement along an arc toward the target coordinate position
Sub Sample_MoveC
Dim aaa As Position
Dim bbb As Position
Dim ccc As Position
TakeArm Keep = 1
'Obtain the motion start position.
aaa = P( 300, 100, 400, 180, 0, 180, -1 )
'Move to the motion start position "aaa".
Move P, aaa
'Obtain the route position.
bbb = P( 600, 50, 400, 180, 0, 180, -1 )
'Obtain the target position.
ccc = P( 300, -200, 400, 180, 0, 180, -1 )
'Starting from the motion start position "aaa", move through "bbb" to "ccc" along with arc path.
Move C, bbb, @P ccc
End Sub
ID : 441