
ID : 4899
Operating Extended-Joints by Specifying a Desired Variable
This section describes how to move to the specified variable.
Moving Both Robot Joints and Extended-Joints Concurrently
1
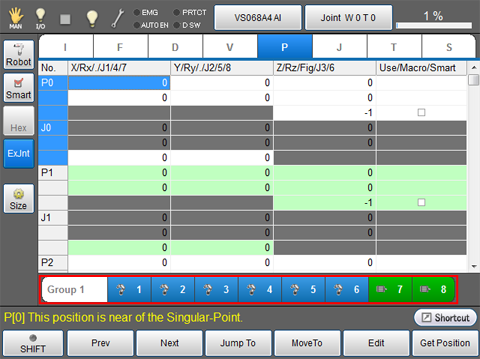
Select an arm group that you intend to use with reference to "Getting Extended-Joint Positions".
In the example below, [Group1] is selected.
2
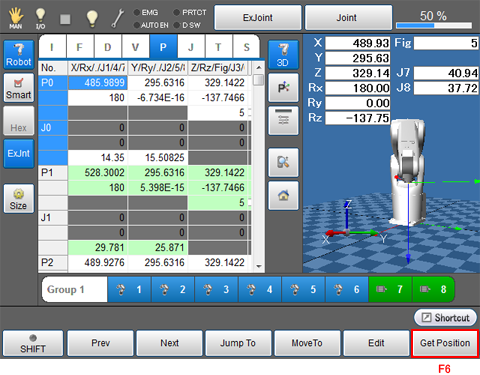
Move the robot and extended-joint to the position desired.
3
Press [F6 Get Position] to obtain the position data into variables.
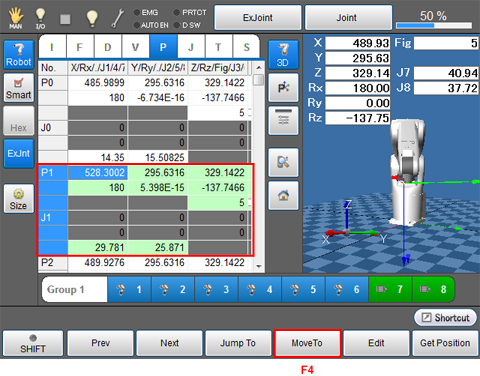
4
Select variables that the robot goes toward, then press [F4 MoveTo].
In the image below, P1/J1 is selected.
5
[Move To] window is displayed as follows. Select PTP Movement or CP movement then press [OK] button with holding deadman switches.
In the image below, PTP Movement is selected.
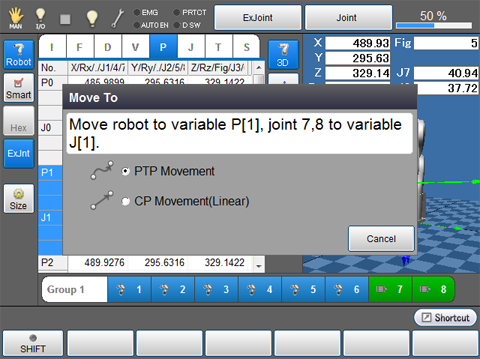
The robot start moving with displaying the progress bar.
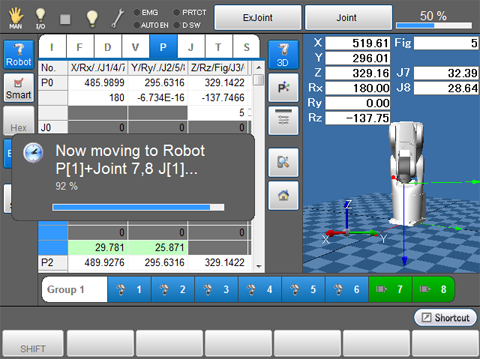
- Hold down deadman switch and [OK] button of the teach pendant while robot is moving. Releasing either one or both of them will interrupt robot move.
-
Moving the extended-joint(s) without moving the robot arms to the specified variables, and vice versa is available as well.
To move the extended-joint, select the extended-joint(s) that you intend to move and then press [F4 Move].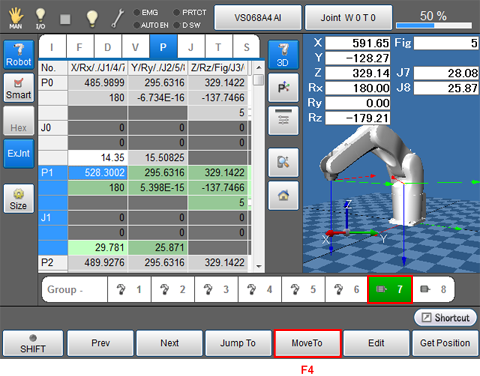
ID : 4899