
ID : 6995
Combination of Figures
COBOTTA can take different figures for its shoulder, elbow, wrist for a single point and attitude (X, Y, Z, RX, RY, and RZ) at the end of the end-effector.
Combining these different figures allows the robot to take different figures for its single position and attitude.
The table below shows available figures.
| Value | Shoulder Figure | Elbow Figure | Wrist Figure | Wrist Figure2 |
|---|---|---|---|---|
| 0 | RIGHTY | ABOVE | FLIP | FLIP2 |
| 1 | LEFTY | ABOVE | FLIP | FLIP2 |
| 2 | RIGHTY | BELOW | FLIP | FLIP2 |
| 3 | LEFTY | BELOW | FLIP | FLIP2 |
| 4 | RIGHTY | ABOVE | NONFLIP | FLIP2 |
| 5 | LEFTY | ABOVE | NONFLIP | FLIP2 |
| 6 | RIGHTY | BELOW | NONFLIP | FLIP2 |
| 7 | LEFTY | BELOW | NONFLIP | FLIP2 |
| 256 | RIGHTY | ABOVE | FLIP | NONFLIP2 |
| 257 | LEFTY | ABOVE | FLIP | NONFLIP2 |
| 258 | RIGHTY | BELOW | FLIP | NONFLIP2 |
| 259 | LEFTY | BELOW | FLIP | NONFLIP2 |
| 260 | RIGHTY | ABOVE | NONFLIP | NONFLIP2 |
| 261 | LEFTY | ABOVE | NONFLIP | NONFLIP2 |
| 262 | RIGHTY | BELOW | NONFLIP | NONFLIP2 |
| 263 | LEFTY | BELOW | NONFLIP | NONFLIP2 |
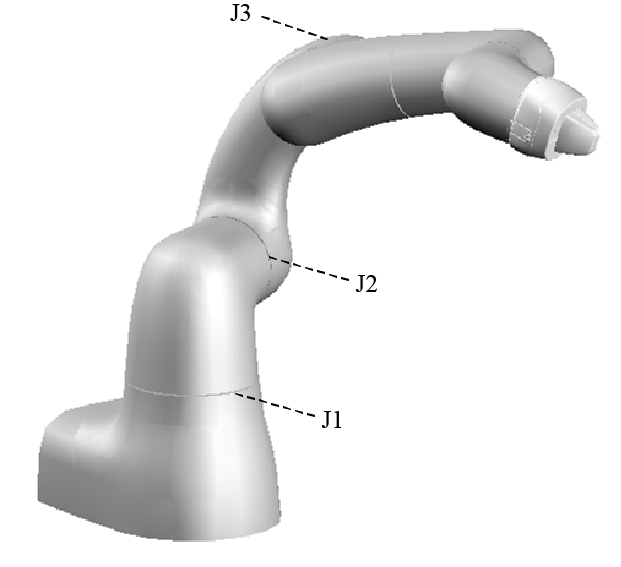
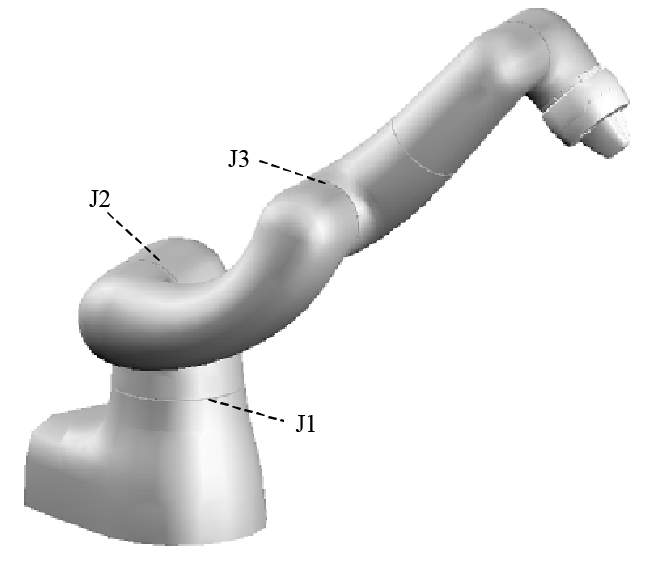
Shoulder Figure
A shoulder figure is defined by a set of the values of the 1st-, 2nd-, and 3rd-axis components.
The robot can take two different shoulder figures--Left-handed (LEFTY) and Right-handed (RIGHTY).
(J1-J6 describes each axis.)
| LEFTY | RIGHTY |
|---|---|
 |
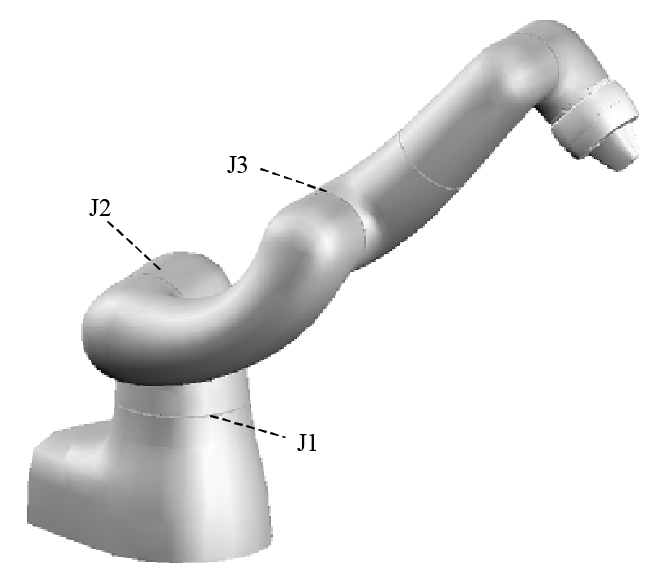 |
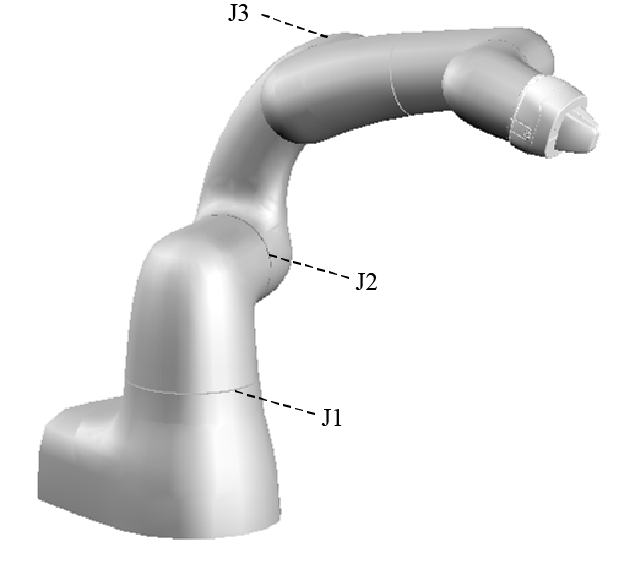
Elbow Figure
An elbow figure is defined by a set of the values of the 2nd- and 3rd-axis components.
The robot can take two different elbow figures--Over-handed (ABOVE) and Under-handed (BELOW).
| ABOVE | BELOW |
|---|---|
 |
 |
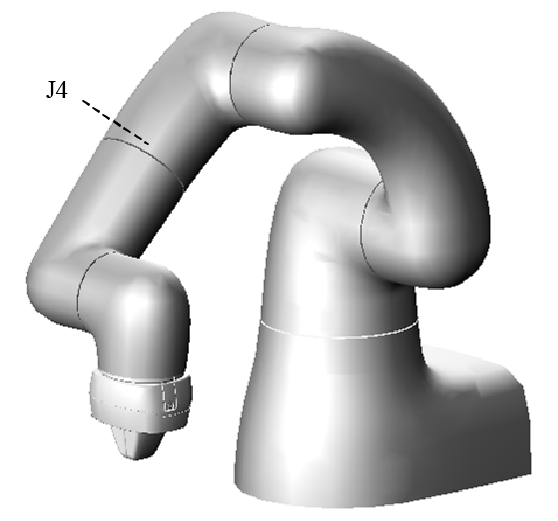
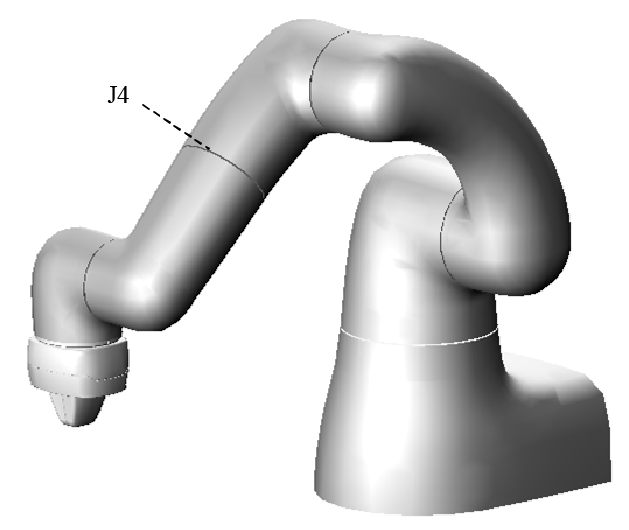
Wrist Figure
A wrist figure is defined by a set of the values of the 4th-axis components.
The robot can take two different wrist figures--Normal (NONFLIP) and Reversed (FLIP).
(J1-J6 describes each axis)
| FLIP | NONFLIP |
|---|---|
 |
 |
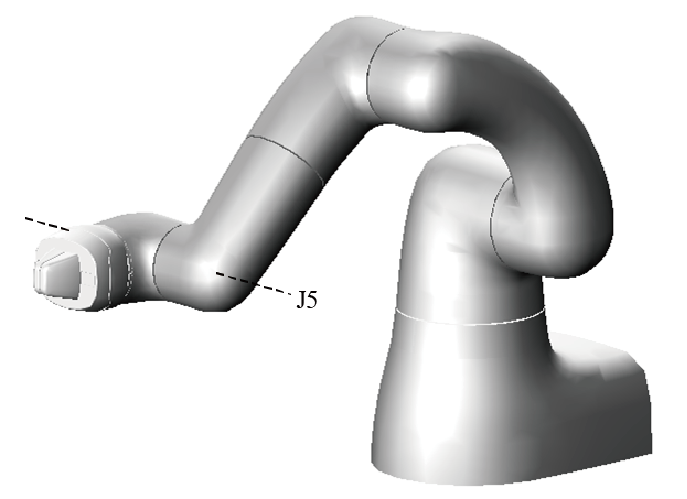
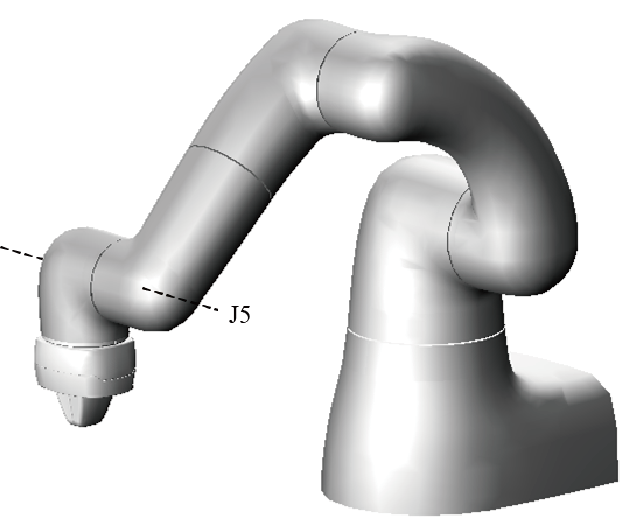
Wrist Figure2
A wrist figure2 is defined by a set of the values of the 5th-axis components.
The robot can take two different wrist figures2--Normal (NONFLIP2) and Reversed (FLIP2).
| FLIP2 | NONFLIP2 |
|---|---|
 |
 |
ID : 6995