
ID : 6998
Boundaries of Robot Figures
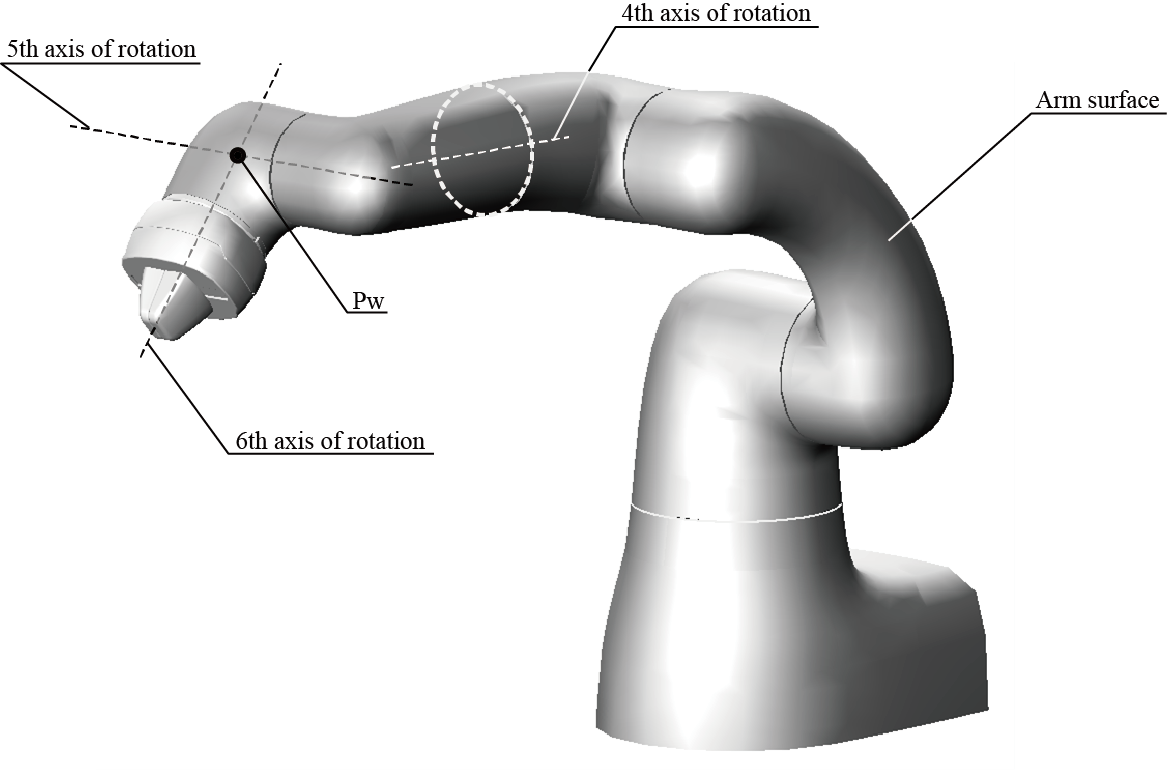
This section describes the boundary of each of the robot shoulder, elbow, wrist, and 6th-axis figures.
When judging the boundaries of the robot shoulder, elbow, and wrist, the system uses intersection point Pw of the two rotary axes of the 5th and 6th axes.
 |
A boundary point in figures is called a singular point.
Any path defined by commands with CP control (e.g., MOVE, APPROACH, and DEPART) should not run through the vicinity of the singular point. If the path runs through the vicinity of the singular point, the robot will issue 84204060 (Overspeed) or 83204070 (Over software motion limit) and then stop.
ID : 6998