
ID : 7302
Description of Functions
The collision detection function monitors the motor torque. If the torque exceeding the detection level is detected, it deems that a collision occurred.
Motor torque is monitored for each axis. If collision is detected at any single axis, it puts COBOTTA to Continue Stop.
The detection level can be set for each axis. Also, the detection can be enabled/disabled for each axis.
This function can set whether to stop a robot on the motion path or to stop the robot after it is set to the axis free status after collision is detected.
Precautions When Operating
- When the setting of the mass of payload is different from the actual mass, a detection error may occur.
- When COBOTTA is operated at a higher speed parameter, a detection error may occur. In this case, adjustment should be made by raising the detection level.
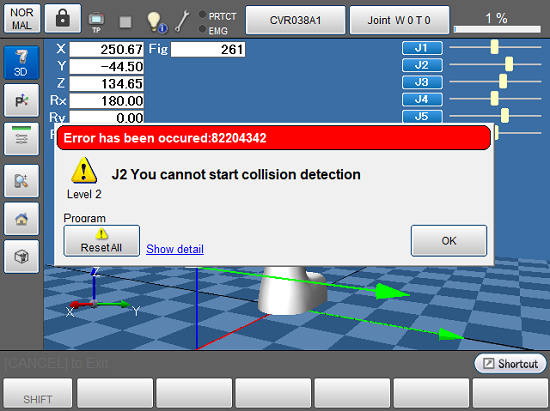
- When monitoring is enabled in one of the following conditions, error "0x8420434*: J* You cannot start collision detection" may occur.
- When a certain force is applied to COBOTTA
- When the detection level of collision detection function is too low
- Depending on the speed or force at the time of collision, not the collision detection error but the excessive position error may occur.
Enabling/Disabling Monitoring
Enable
With COBOTTA, monitoring will be enabled in the following case.
- When the motor power is turned on
Disable
With COBOTTA, monitoring will be disabled in the following cases.
- When the motor power is turned off
- When the following function is used
CALSET
When moving COBOTTA to the CALSET position automatically, the motor turns on. However, the collision detection function remains disabled.
Direct Mode
During the direct mode, the collision detection function is disabled.
When the mode is switched to the normal mode, the collision detection function is enabled.
Current Limiting Function
With the axis, on which current limiting function is used, the collision detection function is disabled.
After disabling the current limiting function and turning the motor power on again, the collision detection function become enabled.
ID : 7302