
ID : 7307
Handling When Collision Is Detected
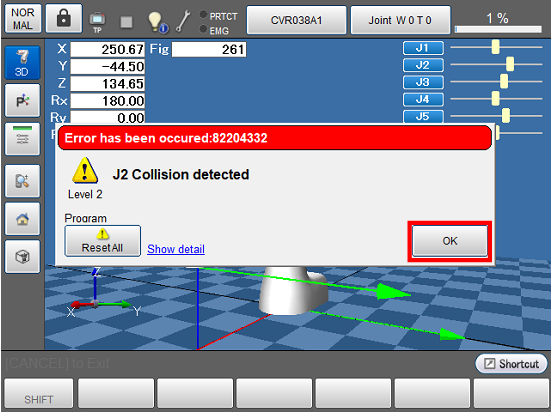
When a collision is detected while the collision detection function is enabled, the robot stops and an error [0x8220433* : J* Collision detected] occurs. The error message is displayed for the axis, on which the collision was detected.
Press [OK] to clear the error message.
When the robot or the tool stops in a state where it has contacted with the facility, the collision detection error may occur repeatedly even if the error message is cleared.
When evacuating the robot, turn off the motor once. After that, evacuate the robot in either of the following ways.
- Set to the direct mode and then operate the arm of the robot by hand to evacuate.
- Disable the collision detection function and then evacuate the robot with manual operation.
To avoid this phenomenon, you can set the robot in the axis free status before stopping the robot after the collision detection. For details, refer to "Setting of Axis Free at Collision Detection"
ID : 7307