
ID : 1039
Program Start (Input)
Function
This signal starts the program specified with the program No. select signal from the external device.
Input Conditions and Operation
By switching the status of this signal from ON (open) to ON (shorted) in external mode, operations (1), (2) and (3) described below will take place. (The status of the signal must be switched from OFF to ON.)
(1) Before Executing or Completing the Program
If the program start signal is input (switched from OFF to ON) when the robot has not yet completed the program or is at rest after it has completed a cycle of the program, the program No. select signal will be read, the program will execute a cycle, and the robot will come to a stop.
Input the program No. select signal before the program start signal (1 ms. or more), and hold the state until the robot starts to operate. If this condition is not met, ERROR will be displayed, the power to the motor will be turned OFF.
|
|
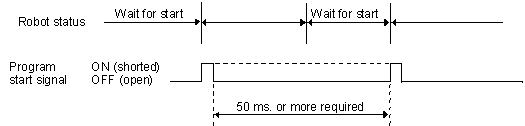
The program start signal requires program start preparation time (50 ms. or more) before input from OFF (open) to ON (shorted).
The program start signal must remain OFF (open) during the program start preparation time. If it is turned ON (shorted) during that time, the next cycle will not start to run.
To start a new cycle, the status of the external start signal must be switched from OFF to ON before each cycle.
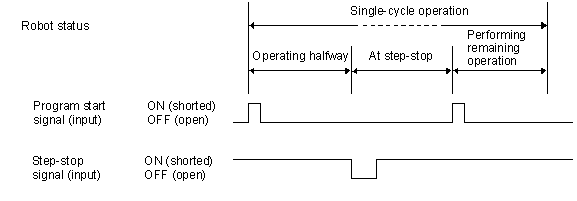
(2)Step-stopped Status During Program Execution
When the status of the program start signal is switched from OFF to ON with the program step-stopped, the program will resume from the step following the suspended step and stop at the cycle end.
 |
(3)Instantaneous Stop Status During Program Execution
When the status of the program start signal is switched from OFF to ON with the program immediately stopped, the program will resume from the suspended step and stop at the cycle end.
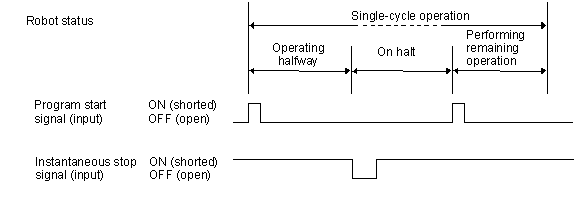 |
To cancel the execution of the remaining steps of an instantaneously stopped program and start it from the beginning, input a program reset signal, a program No. select signal and a program start signal at the same time. For further information, refer to "Program Reset (Input)".
Example of Program Start Signal Rise (ON) and Fall (OFF) Timing
Example of Program Start Signal Rise (ON) Timing
The figure below shows how to make the program start signal rise with robot system outputs (external mode output and single-cycle end output).
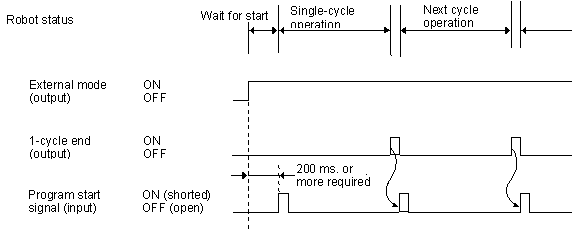 |
The program start signal for the first cycle rises as soon as the external mode becomes valid and the conditions of the peripheral devices are met. The program start signal for subsequent cycles rises after output of a single-cycle end signal.
Example of Program Start Signal Fall (OFF) Timing
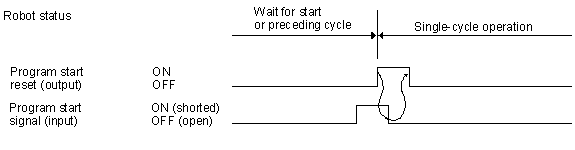
How to make the program start signal fall with a robot system output (program start reset output).
When the robot program starts to run, a program start reset signal is output. The external device receives it and makes the program start signal fall (OFF).
 |
How to make the program start signal fall with the simplified method (1 shot method using a timer).
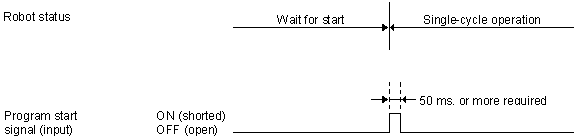 |
- Although the 1 shot method is easy, the timer setting for falling to raise the program start signal in the middle of the preceding cycle is difficult.<br />
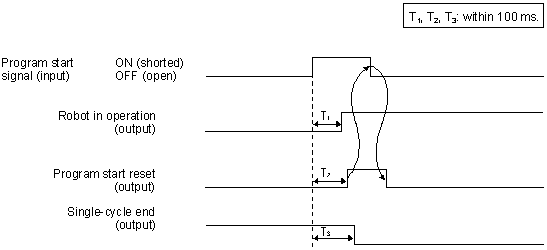
Use this method only to raise the program start signal after the robot stops at the end of each cycle. - The status of the robot-in-operation, program start reset and single cycle end output signals changes in sequence after the program start signal is input (T1 -> T2 -> T3 in the figure given on the next timing chart).
The change of the status of these signals takes place within 100 ms. after the program start signal rises (ON).
 |
ID : 1039