
ID : 1498
Operations
Maximum program speed
This parameter is used for setting maximum speed stored as point data
Input range: 20-100 (%)
Initial value: 100
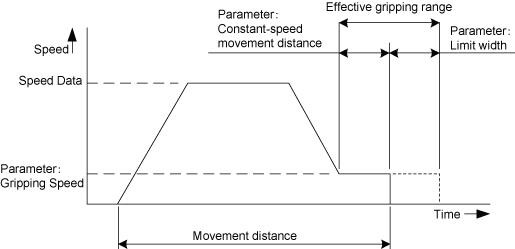
Gripping Speed
This parameter is used for setting gripping speed within the effective gripping range in the Accelerated/Decelerated Absolute (or Relative) Movement and Grip mode.
Input range: 20- 100(%) Initial value: 20(%)
Note: If gripping speed is set over the maximum speed, the maximum speed becomes gripping speed.
Constant-speed movement zone
This parameter is used for setting the distance of constant-speed movement in the Accelerated/Decelerated Absolute (or Relative) Movement and Grip mode. The fingers move from the beginning point of constant-speed movement zone to the target position at gripping speed.
Input range: 0.01~99.99(in 0.01mm) Initial value: 2 (mm)
Limit width
This parameter is used for setting limit width during constant-speed movement in the Accelerated/Decelerated Absolute (or Relative) Movement and Grip mode. The fingers move from the target position to the end of limit width at gripping speed. If the fingers moved beyond the effective gripping range, they stop at the point (movement distance + limit width) and the INPOS signals are asserted while the HOLD signal is deasserted.
Input range: 0.01-99.99 (in 0.01mm) Initial value: Differs depending on the actuator type.
Note: When performing an acceleration/deceleration absolute position movement/grip operation, if the movement start position lies inside the limit width range, the electric gripper will only move to the final position, but will not grip. To prevent this, set the limit width to the minimum value. Gripping will be performed if the movement start position lies within the constant speed movement distance range.
(+)Soft limit
This parameter is used for setting a positive movable range.
Input range: 0-999.9 (unit: 0.1mm)
Initial value: differs depending on the actuator type
If you set the direction in which the fingers return to their original positions to OPEN, the closing direction becomes positive direction.
If you set the direction in which the fingers return to their original positions to CLOSE, the opening direction becomes positive direction.
After point data were specified, prevent the fingers from moving out of the soft limit range when inputting an operation instruction.
(-)Soft limit
This parameter is used for setting a negative movable range
Input range: -999.9 – 0 (unit: 0.1mm)
Initial value: differs depending on the actuator type
If you set the direction in which the fingers return to their original positions to OPEN, the closing direction becomes positive direction.
If you set the direction in which the fingers return to their original positions to CLOSE, the opening direction becomes positive direction.
This parameter prevents the fingers from moving out of the soft limit range when inputting an operation instruction after point data were specified.
When operation is instructed by specifying point data out of soft limit range, the controller stops working immediately after the error stop was triggered.
Stroke
This parameter is used for setting actuator stroke length.
Initial value: differs depending on the actuator type
Input range: 0 – 999.9 (in 0.1mm)
Initial value differs depending on the actuator type.
Positioning completion distance
When the fingers travel to the specified point, the INPOS signals for representing movement completion are asserted just before the fingers reach the specified point.
Increase the parameter to shorten tact time of the system.
Input range: 0.01-655.35 (in 0.01 mm)
Initial value: Differs depending on the actuator type.
ID : 1498