
ID : 2480
Safe Stop 2 (SS2)
Function
This function reduces the robot speed to stop. Motor power remains ON after the stop.
This stop mechanism is equivalent to the stop category 2 of IEC60204-1.
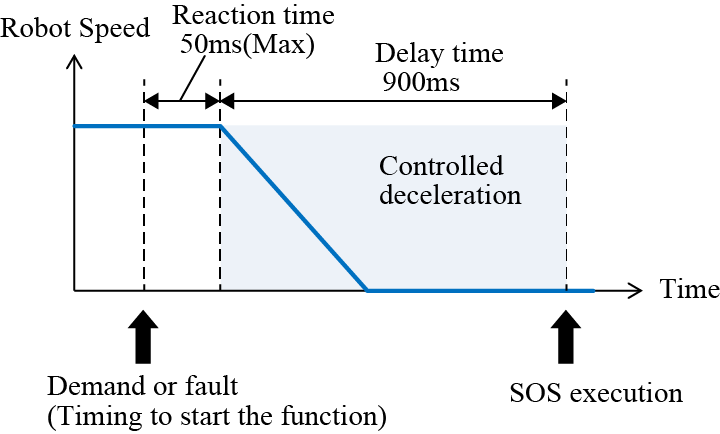
Once the SS2 input of Safety motion input turns off, the robot starts deceleration. This function monitors the change of each axis' encoder value. When the change value goes below the setting value, or when the predetermined time (the maximum deceleration time required to robot's complete stop) has elapsed, this signal is shifted to the SOS function.
Use Conditions
| Input signal | SS2 input |
|---|---|
| Output signal | none |
| Monitoring target | Each robot axis, Extended-joint |
| Monitoring area setting | The maximum encoder value of each axis that is required to judge the robot's complete stop. |
| Reaction time | 50 ms (Max) |
| Process Safety Time (PST) | 950 ms |
| Operation mode | Auto mode |
| Timing to start the function | Function starts when SS2 input turns OFF. |
If SS2 input is used under the Motor-OFF state, an error occurs at the timing of Motor-ON because the robot position slightly changes. In this case, do the following operation beforehand.
- 6-axis robot : Gravity Compensation Function
- 4-axis robot : GrvOffset
ID : 2480