
ID : 5318
Configuring Robot Joints
The MC8 series controller is capable of controlling a maximum of eight joints.
The motors connected to the controller can be configured as robot joints or extended-joints.
Any or all of joints 1 to 4 can be configured as robot joints.
Robot joints can be driven by robot motion commands enabling CP motion (linear and circular).
To enable those robot motion commands, however, joints J1 to J4 should be configured as predetermined.
All joints except robot joints are used as extended-joints.
For details about operations of robot joints and extended-joints, refer to the "Extended-joint Manual" .
Robot Joints
According to the number of robot joint used, configuring robot joints J1 to J4 in Cartesian coordinates will enable you to drive those joints with robot motion command with CP motion (linear and circular).
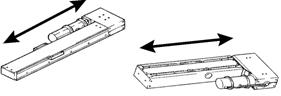
The following images show available motion directions in different robot joints configuration.
| Configuring with a single joint | 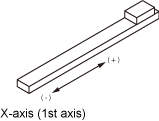 |
|---|---|
| Configuring with two joints | 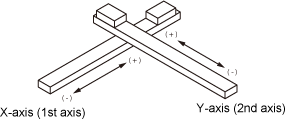 |
| Configuring with three joints | 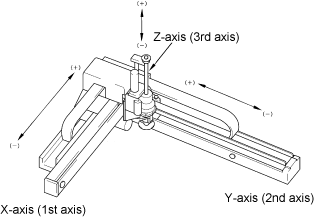 |
| Configuring with four joints | 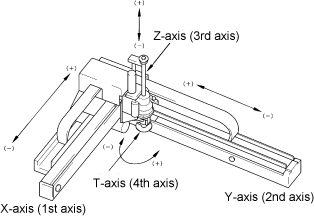 |
To drive joints correctly in a CP motion (linear or circular), the joint configuration and the motion directions must match the Cartesian coordinates (coordinates for RIGHTY) shown above.
In a different joint configuration, executing a CP motion command causes an unexpected motion. It is dangerous. Use a PTP motion instead of a CP motion.
Extended-Joints
A single extended-joint is configured as shown below. It can execute only PTP motion. A MOVE command is not available for extended-joints, so use "DriveA" and "Drive commands" to drive extended-joints.
ID : 5318
- Related Information
- Configuring Robot Joints