
ID : 1148
Communication Setting of Robot Controller
Perform the communication setting of a robot controller so that the robot controller can communicate with a force sensor through Ethernet.
To do this, you need to know the IP address that is set to the force sensor.
This section describes on the assumption that the IP address of the force sensor is the factory default value (192.168.1.1).
1
Perform the setting of the robot controller, with the robot controller and the force sensor are not connected through Ethernet cable. If those are connected, remove them once, and connect them again after the setting of the robot controller completes.
2
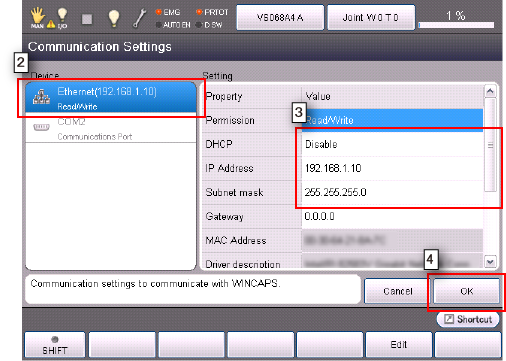
With the teach pendant, perform the communication setting of the robot controller.
-
Perform the following operation.
Operation path: Basic screen - [F6 setting] - [F5 Communication and Token] - [F2 Network and Permission]
-
[Communication Settings] window is displayed. Select "Ethernet".
-
Set as shown in the following table.
(Items other than below are not required to change)
DHCP Disable IP Address 192.168.1.10 Subnet mask 255.255.255.0 -
Click [OK] on the [Communication Settings] window.
Above setting value is an example. If it is inconvenient in your environment in use, set another value that can communicate with the force sensor.
3
This completes the setting.
After connecting the robot controller and the force sensor through an Ethernet cable, configure the force sensor–based force control function. For how to configure the function, refer to "Parameter Setting”.
ID : 1148