
ID : 2609
Safe Reference Position Check
Function
This function checks that the values of the Safe reference position currently recognized by the safety motion is consistent with that of the preliminarily registered in the safety motion.
Turning OFF (release) of the Safe reference position check input checks the consistency of them. Once the consistency is confirmed, the Safe reference position check output turns ON. In this case, monitoring is performed correctly.
If Safe reference position check output is OFF, it shows the monitoring is failed.
Use Conditions
| Input signal | Safe Reference Position Check Input |
|---|---|
| Output signal | Safe Reference Position Check Output |
| Monitoring target | - |
| Monitoring area setting | none |
| Operation mode | Manual mode |
| Timing to start the function | Turning OFF (release) of Safe Reference Position Check input |
Safe Reference Position Check Procedure
1. Registration of Safe Reference Position
The following shows how to register the Safe reference position.
If the Safe reference position check input is OFF (release) at the initial start-up of the controller, an error occurs. In this case, perform "Registration of Safe reference position" and then reboot the controller.
1
Set the robot to the posture and position where angles of all axes are obvious (for example, set all axes to 0 degree.)
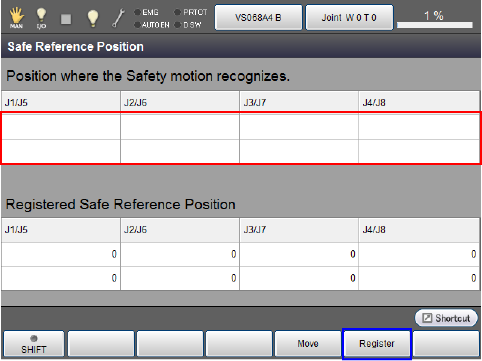
With a teach pendant, open the Safe Reference Position window of Safety Motion. Cells enclosed by the red square in the following image are the current position values recognized by the safety motion. Check if these values are correct.
Operation path : [F2 Arm] - [F12 Maintenance] - [F5 Safety Motion] - [F2 Safe Reference]
2
Move the robot to the safe reference position that has been specified by users.
It is recommended to set the position confirmed in STEP1 as a Safe reference position. However, since the Safe reference position check may be performed after the installation, be sure to select the Safe reference position where it can be set after the installation.
3
Press the [Register] button of the teach pendant. The position recognized by the safety motion will be registered as the safe reference position.
4
Export Safe reference position data from in the controller to WINCAPSIII, and then save it.
When you export data to WINCAPSIII, on the [Transfer data] window of WINCAPSIII, on the [Controller] pane, select [Other], and then select [Monitoring area data]. For details about operation, refer to Data Transfer of WINCAPSIII GUIDE.
5
Start the RC8A Safety parameter tool, and then send the safe reference position data to the safety motion.
When the RC8A Safety parameter tool opens the saved project, Safe reference position data is read at the same time, and the data is sent to the safety motion when the monitoring model is sent to the controller. For details about procedure, refer to Sending Monitoring Data.
2. Check of the Registered Safe Reference Position
The following shows how to check the consistency between the safe reference position recognized by the safety motion and that of the preliminarily registered in the safety motion.
1
Move a robot to the Safe reference position.
To move the robot in Manual mode, with a teach pendant, on the Safe Reference Position window (see the image above), press [Move] button.
To move the robot from a program, with SafetyInfo command, obtain the value of Safe reference position (index number :7), and then create a program that moves the robot to the position.
2
Turn OFF (release) the Safe Reference Position Check Input from an external device.
Safe Reference Position Check Output turns ON if the values of the Safe reference position currently recognized by the safety motion is consistent with that of the preliminarily registered in the safety motion.
Tips for Safe Reference Position Check Output
Monitoring is performed normally while the Safe Reference Position Check Output turns ON.
If the controller power supply is turned OFF and then ON again, this output will turn ON again.
- When the power supply is turned OFF, each axis' angles will be saved. If fail to save, the error 0x834A0021, "Safe reference position check output was turned OFF" will be displayed at the next time of power activation. Perform "Check of the registered Safe reference position" again, before operating robot.
- If the robot is moved while the controller power is OFF, an error occurs when you turn ON the controller and the Safe reference position check output does not turn ON. In this case, perform "Check of the registered Safe reference position" again.
- If you perform CALSET, an error occurs and this output turns OFF.
After CALSET, the parameter should be reflected to the safety motion, and the Safe Reference Position Check should be confirmed.
Follow the procedure below to do the "Check of the registered Safe reference position".1. Receive all the data of the robot controller with WINCAPSIII and save the project data of WINCAPSIII (refer to "Data Transfer" of WINCAPSIII GUIDE).
2. Open the project data of WINCAPSIII saved by following the procedure 1. by RC8A Safety parameter tool, and send "the necessary data for monitoring" to the robot controller (refer to "Sending Monitoring Data").
3. Restart the robot controller.
4. Do the "Check of the registered Safe reference position".
ID : 2609