
ID : 2611
Safe Reference Position Check Output
Function
This signal outputs when the Safe reference position recognized by the safety motion is consistent with that of the preliminarily registered in the safety motion. (Dual lines)
Monitoring may fail if this signal turns OFF.
Terminal Number
| Signal name | Terminal Number |
|---|---|
| Safe Reference Position Check Output (Line 1) | No.13 and 47 of Motion I/O output |
| Safe Reference Position Check Output (Line 2) | No.27 and 61 of Motion I/O output |
How to Use
This output is used to check the state of Safe reference position.
ON Condition
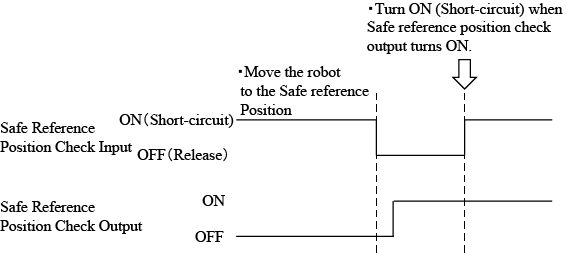
When the robot is moved to the Safe reference position and the Safe reference position check input turns OFF (release), if the values of Safe reference position currently recognized by safety motion is consistent with that of the preliminarily registered in the safety motion, this signal turns ON.
OFF Condition
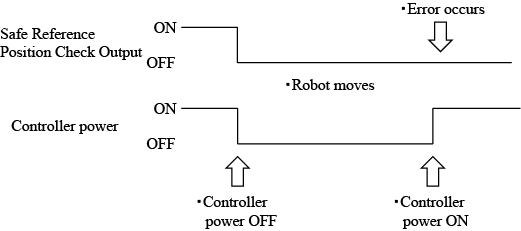
- If robot is moved while the controller power is OFF, when you turn ON the controller, an error occurs and this signal turns OFF.
- If the Safe reference position is changed by CALSET, an error occurs and this signal turns OFF.
Timing Chart
Motion of Safe Reference Position Check Input
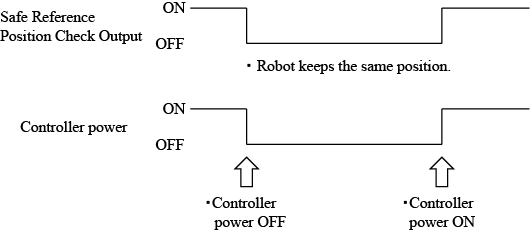
Safe Reference Position Check Output Keeps ON at the Controller Startup
Safe Reference Position Check Output Turns OFF and an Error Occurs at the Controller Startup
ID : 2611