
ID : 2469
Safe Reference Position Check Input
Function
Turning OFF (release) of Safe Reference Position Check input will check if the safe reference position recognized by the safety motion is consistent with that of the preliminarily registered in the safety motion.
Terminal Number
| Signal name | Terminal Number |
|---|---|
| Safe Reference Position Check Input (Line 1) | No.15 and 49 of Motion I/O Input |
| Safe Reference Position Check Input (Line 2) | No.31 and 65 of Motion I/O Input |
Input Condition and Operation
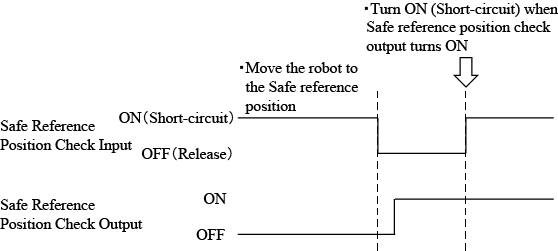
Turning OFF (release) of this input performs Safe Reference Position Check. Safe Reference Position Check output turns ON if these positions are consistent. Turn ON (short-circuit) this input once Safe Reference Position Check output turns ON.
- If the time difference between two Safe Reference Position Check inputs is 0.5 second or more, it is deemed as an abnormal state. An error is issued and the motor power will turn off.
- Use different contacts to control two Safe Reference Position Check inputs. If one Safe Reference Position Check circuit is always short-circuited, or if two Safe Reference Position Check circuits are joined in one circuit, it is deemed as an external circuit error, as a result, the robot cannot start operation.
Timing Chart
ID : 2469